本文是运维系统智能化的一次探索工作,论文的作者是清华大学的裴丹教授,论文的题目是《Opprentice: Towards Practical and Automatic Anomaly Detection Through Machine Learning》。目的是基于机器学习的 KPI(Key Performance Indicator)的自动化异常检测。
标题 Opprentice 来源于(Operator’s Apprentice),意思就是运维人员的学徒。本文通过运维人员的业务经验来进行异常数据的标注工作,使用时间序列的各种算法来提取特征,并且使用有监督学习模型(例如 Random Forest,GBDT,XgBoost 等)模型来实现离线训练和上线预测的功能。本文提到系统 Opprentice 使用了一个多月的历史数据进行分析和预测,已经可以做到准确率>=0.66,覆盖率>=0.66 的效果。
1. Opprentice的介绍
系统遇到的挑战:
Definition Challenges: it is difficult to precisely define anomalies in reality.(在现实环境下很难精确的给出异常的定义)
Detector Challenges: In order to provide a reasonable detection accuracy, selecting the most suitable detector requires both the algorithm expertise and the domain knowledge about the given service KPI (Key Performance Indicators). To address the definition challenge and the detector challenge, we advocate for using supervised machine learning techniques. (使用有监督学习的方法来解决这个问题)
该系统的优势:
(i) Opprentice is the first detection framework to apply machine learning to acquiring realistic anomaly definitions and automatically combining and tuning diverse detectors to satisfy operators’ accuracy preference.
(ii) Opprentice addresses a few challenges in applying machine learning to such a problem: labeling overhead, infrequent anomalies, class imbalance, and irrelevant and redundant features.
(iii) Opprentice can automatically satisfy or approximate a reasonable accuracy preference (recall>=0.66 & precision>=0.66). (准确率和覆盖率的效果)
2. 背景描述:
KPIs and KPI Anomalies:
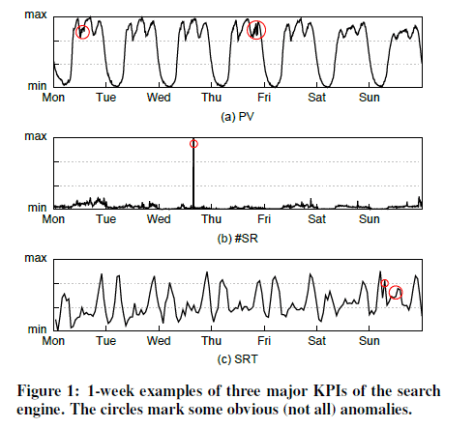
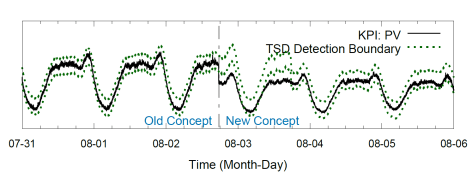
KPIs: The KPI data are the time series data with the format of (time stamp, value). In this paper, Opprentice pays attention to three kinds of KPIs: the search page view (PV), which is the number of successfully served queries; The number of slow responses of search data centers (#SR); The 80th percentile of search response time (SRT).
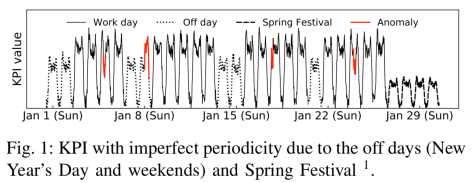
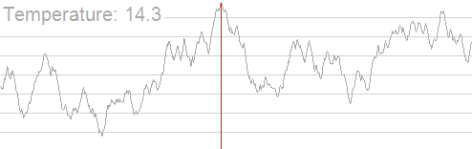
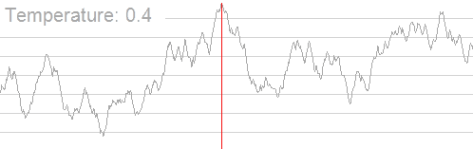
Anomalies: KPI time series data can also present several unexpected patterns (e.g. jitters, slow ramp ups, sudden spikes and dips) in different severity levels, such as a sudden drop by 20% or 50%.
问题和目标:
覆盖率(recall):# of true anomalous points detected / # of the anomalous points
准确率(precision):# of true anomalous points detected / # of anomalous points detected
1-FDR(false discovery rate):# of false anomalous points detected / # of anomalous points detected = 1 – precision
The quantitative goal of opprentice is precision>=0.66 and recall>=0.66.
The qualitative goal of opprentice is automatic enough so that the operators would not be involved in selecting and combining suitable detectors, or tuning them.
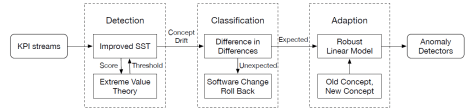
3. Opprentice Overview: (Opprentice系统的概况)
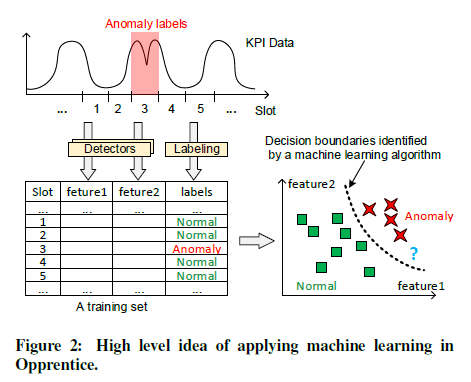
(i) Opprentice approaches the above problem through supervised machine learning.
(ii) Features of the data are the results of the detectors.(Basic Detectors 来计算出特征)
(iii) The labels of the data are from operators’ experience.(人工打标签)
(iv) Addressing Challenges in Machine Learning: (机器学习遇到的挑战)
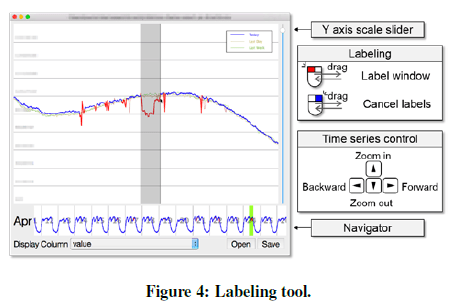
(1) Label Overhead: Opprentice has a dedicated labeling tool with a simple and convenient interaction interface. (标签的获取)
(2) Incomplete Anomaly Cases:(异常情况的不完全信息)
(3) Class Imbalance Problem: (正负样本比例不均衡)
(4) Irrelevant and Redundant Features:(无关和多余的特征)
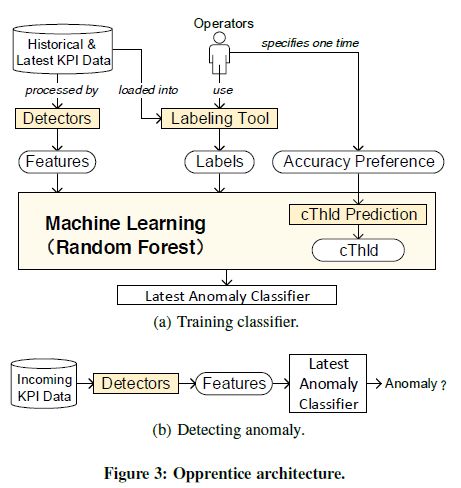
4. Opprentice’s Design:
Architecture: Operators label the data and numerous detectors functions are feature extractors for the data.
Label Tool:
人工使用鼠标和软件进行标注工作
Detectors:
(i) Detectors As Feature Extractors: (Detector用来提取特征)
Here for each parameter detector, we sample their parameters so that we can obtain several fixed detectors, and a detector with specific sampled parameters a (detector) configuration. Thus a configuration acts as a feature extractor:
data point + configuration (detector + sample parameters) -> feature,
(ii) Choosing Detectors: (Detector的选择,目前有14种较为常见的)
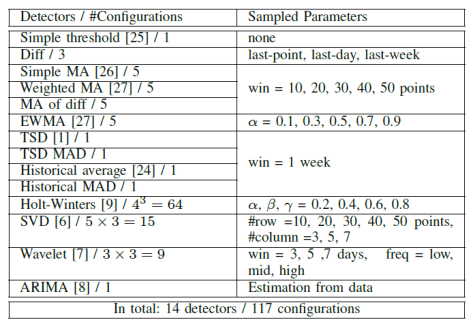
Opprentice can find suitable ones from broadly selected detectors, and achieve a relatively high accuracy. Here, we implement 14 widely-used detectors in Opprentice.
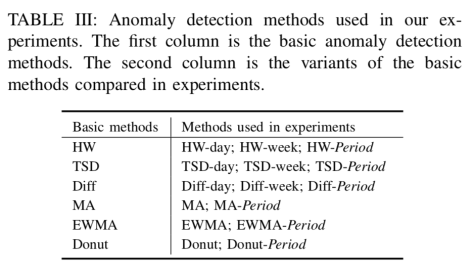
Opprentice has 14 widely-used detectors:
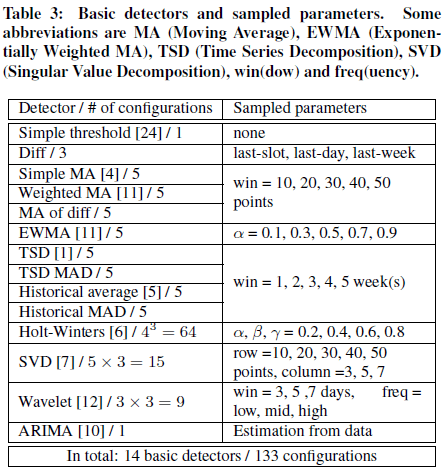
“Diff“: it simply measures anomaly severity using the differences between the current point and the point of last slot, the point of last day, and the point of last week.
“MA of diff“: it measures severity using the moving average of the difference between current point and the point of last slot.
The other 12 detectors come from previous literature. Among these detectors, there are two variants of detectors using MAD (Median Absolute Deviation) around the median, instead of the standard deviation around the mean, to measure anomaly severity.
(iii) Sampling Parameters: (Detector的参数选择方法,一种是扫描参数空间,另外一种是选择最佳的参数)
Two methods to sample the parameters of detectors.
(1) The first one is to sweep the parameter space. For example, in EWMA, we can choose  to obtain 5 typical features from EWMA; Holt-Winters has three [0,1] valued parameters
to obtain 5 typical features from EWMA; Holt-Winters has three [0,1] valued parameters  . To choose
. To choose  , we have
, we have  features; In ARIMA, we can estimate their “best” parameters from the data, and generate only one set of parameters, or one configuration for each detector.
features; In ARIMA, we can estimate their “best” parameters from the data, and generate only one set of parameters, or one configuration for each detector.
Supervised Machine Learning Models:
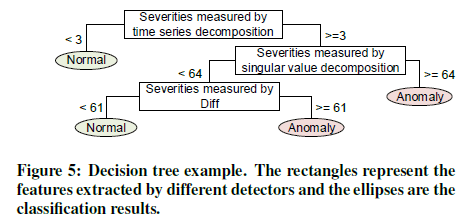
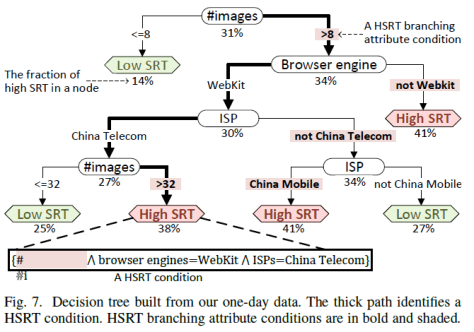
Decision Trees, logistic regression, linear support vector machines (SVMs), and naive Bayes. 下面是决策树(Decision Tree)的一个简单例子。
Random Forest is an ensemble classifier using many decision trees. It main principle is that a group of weak learners (e.g. individual decision trees) can together form a strong learner. To grow different trees, a random forest adds some elements or randomness. First, each tree is trained on subsets sampled from the original training set. Second, instead of evaluating all the features at each level, the trees only consider a random subset of the features each time. The random forest combines those trees by majority vote. The above properties of randomness and ensemble make random forest more robust to noises and perform better when faced with irrelevant and redundant features than decisions trees.
Configuring cThlds: (阈值的计算和预估)
(i) methods to select proper cThlds: offline part
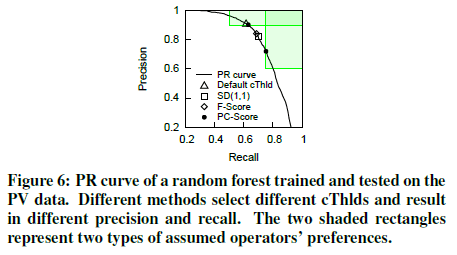
We need to figure cThlds rather than using the default one (e.g. 0.5) for two reasons.
(1) First, when faced with imbalanced data (anomalous data points are much less frequent than normal ones in data sets), machine learning algorithems typically fail to identify the anomalies (low recall) if using the default cThlds (e.g. 0.5).
(2) Second, operators have their own preference regarding the precision and recall of anomaly detection.
The metric to evaluate the precision and recall are:
(1) F-Score: F-Score = 2*precision*recall/(precision+recall).
(2) SD(1,1): it selects the point with the shortest Euclidean distance to the upper right corner where the precision and the recall are both perfect.
(3) PC-Score: (本文中采用这种评估指标来选择合适的阈值)
If r>=R and p>=P, then PC-Score(r,p)=2*r*p/(r+p) + 1; else PC-Score(r,p)=2*r*p/(r+p). Here, R and P are from the operators’ preference “recall>=R and precision>=P”. Since the F-Score is no more than 1, then we can choose the cThld corresponding to the point with the largest PC-Score.
(ii) EWMA Based cThld Prediction: (基于EWMA方法的阈值预估算法)
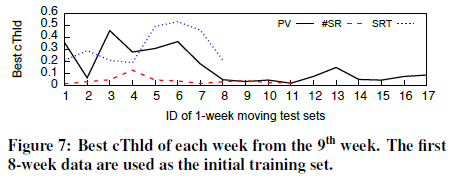
In online detection, we need to predict cThlds for detecting future data.
Use EWMA to predict the cThld of the i-th week ( or the i-th test set) based on the historical best cThlds. Specially, EWMA works as follows:
If  , then
, then  5-fold prediction
5-fold prediction
Else  , then
, then  +
+ , where
, where  is the best cThld of the (i-1)-th week.
is the best cThld of the (i-1)-th week.  is the predicted cThld of the i-th week, and also the one used for detecting the i-th week data.
is the predicted cThld of the i-th week, and also the one used for detecting the i-th week data. ![\alpha\in [0,1]](https://s0.wp.com/latex.php?latex=%5Calpha%5Cin+%5B0%2C1%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) is the smoothing constant.
is the smoothing constant.
For the first week, we use 5-fold cross-validation to initialize  . As
. As  increases, EWMA gives the recent best cThlds more influences in the prediction. We use
increases, EWMA gives the recent best cThlds more influences in the prediction. We use  in this paper.
in this paper.
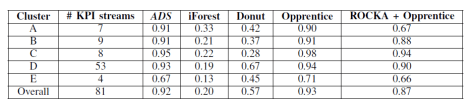
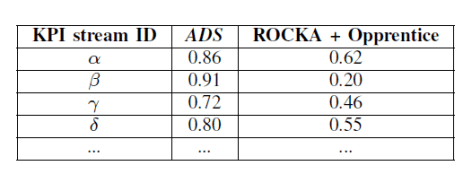
5. Evaluation(系统评估)
在 Opprentice 系统中,红色表示 Opprentice 系统的方法,黑色表示其他额外的方法。
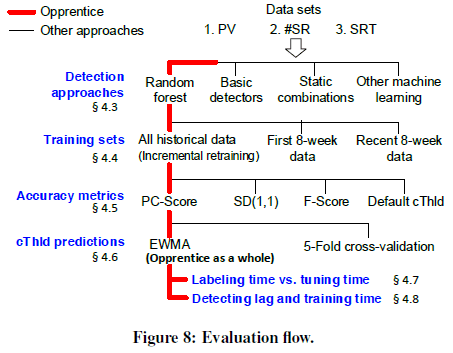
Opprentice has 14 detectors with about 9500 lines of Python, R and C++ code. The machine learning block is based on the scikit-learn library.
Random Forest is better than decision trees, logistic regression, linear support vector machines (SVMs), and naive Bayes.

![£¨Í¼±í£©[Éç»á]2020Äê½Ú¼ÙÈշżٰ²ÅŹ«²¼](https://zr9558.com/wp-content/uploads/2020/05/2020e5b9b4e4b8ade59bbde88a82e58187e697a5e5ae89e68e92.jpg?w=474)





![s\in[-w,w]\cap\mathbb{Z}](https://s0.wp.com/latex.php?latex=s%5Cin%5B-w%2Cw%5D%5Ccap%5Cmathbb%7BZ%7D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)



![NCC(X,Y)=\max_{s\in[-w,w]\cap\mathbb{Z}}\frac{CC_{s}(X,Y)}{\|x\|_{2}\cdot\|y\|}.](https://s0.wp.com/latex.php?latex=NCC%28X%2CY%29%3D%5Cmax_%7Bs%5Cin%5B-w%2Cw%5D%5Ccap%5Cmathbb%7BZ%7D%7D%5Cfrac%7BCC_%7Bs%7D%28X%2CY%29%7D%7B%5C%7Cx%5C%7C_%7B2%7D%5Ccdot%5C%7Cy%5C%7C%7D.&bg=ffffff&fg=2b2b2b&s=0&c=20201002)


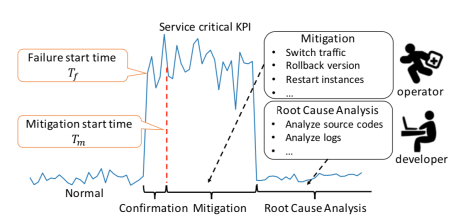
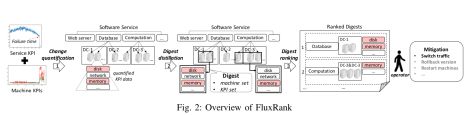
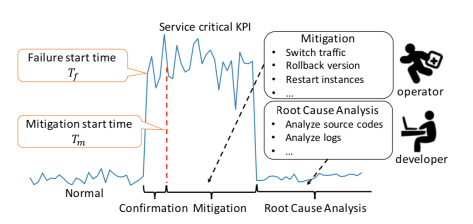
 ,这个时间戳是运维领域非常重要的时间戳,它由异常检测(anomaly detection)产生,无论在告警收敛(alarm convergence)还是根因分析(root cause analysis)都非常依赖这个时间戳。而另外一个时间戳虽然没有故障开始时间那么重要,但是也有着其实用价值,那就是缓和开始时间(mitigation start time),它表示故障虽然还没有恢复,但是出于稍微平稳的走势,并没有持续恶化。在出现了故障之后,通常都会发送相应的告警给运维人员,那么在发送告警的时候,如果将异常定位的结果随之带出,则会大大减少运维人员排障的时间。在故障缓和的时间内,运维人员通常需要进行必要的操作来排查故障,例如切换流量(switch Traffic),回滚版本(Rollback Version),重启实例(Restart Instances),下线机器等操作。除此之外,为了定位问题(Root Cause Analysis),运维人员需要分析源码(Code Analysis),查看日志(Log Analysis)等一系列操作。如果能够将这一系列操作融入相应的机器学习模块中,将会节省运维人员大量的排障时间。
,这个时间戳是运维领域非常重要的时间戳,它由异常检测(anomaly detection)产生,无论在告警收敛(alarm convergence)还是根因分析(root cause analysis)都非常依赖这个时间戳。而另外一个时间戳虽然没有故障开始时间那么重要,但是也有着其实用价值,那就是缓和开始时间(mitigation start time),它表示故障虽然还没有恢复,但是出于稍微平稳的走势,并没有持续恶化。在出现了故障之后,通常都会发送相应的告警给运维人员,那么在发送告警的时候,如果将异常定位的结果随之带出,则会大大减少运维人员排障的时间。在故障缓和的时间内,运维人员通常需要进行必要的操作来排查故障,例如切换流量(switch Traffic),回滚版本(Rollback Version),重启实例(Restart Instances),下线机器等操作。除此之外,为了定位问题(Root Cause Analysis),运维人员需要分析源码(Code Analysis),查看日志(Log Analysis)等一系列操作。如果能够将这一系列操作融入相应的机器学习模块中,将会节省运维人员大量的排障时间。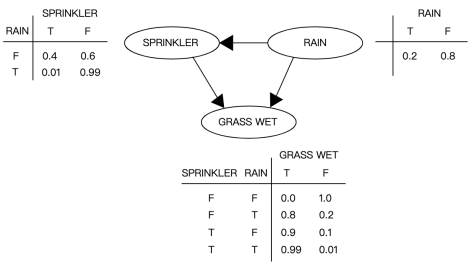
 。
。 ,
,  。
。 ,
, ,
, ,
,
 。从 Bayes 公式可以得到:
。从 Bayes 公式可以得到: 。分别计算分子分母即可:
。分别计算分子分母即可:

 ,
,



 。在失败开始时间
。在失败开始时间  小于或者等于
小于或者等于  即可。关键时间点的排序为
即可。关键时间点的排序为  。
。![X=[x_{1},\cdots,x_{n}]](https://s0.wp.com/latex.php?latex=X%3D%5Bx_%7B1%7D%2C%5Ccdots%2Cx_%7Bn%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 而言,MAD 定义为
而言,MAD 定义为  ,而每个点的异常程度可以定义为:
,而每个点的异常程度可以定义为: 当
当  较大或者较小的时候,表示上涨或者下降的异常程度。通过设置相应的阈值,同样可以获得时间序列的异常开始时间。
较大或者较小的时候,表示上涨或者下降的异常程度。通过设置相应的阈值,同样可以获得时间序列的异常开始时间。![X=[x_{1},x_{2},\cdots,x_{n}]](https://s0.wp.com/latex.php?latex=X%3D%5Bx_%7B1%7D%2Cx_%7B2%7D%2C%5Ccdots%2Cx_%7Bn%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,可以预估它的目标值(target value)
,可以预估它的目标值(target value) ,通常可以用均值来估计,也需要计算出这条时间序列的标准差
,通常可以用均值来估计,也需要计算出这条时间序列的标准差  。通常设定
。通常设定  ,
, 。而 Tabular CUSUM 指的是迭代公式
。而 Tabular CUSUM 指的是迭代公式 ![C_{i}^{+}=\max[0,x_{i}-(\mu_{0}+K)+C_{i-1}^{+}]](https://s0.wp.com/latex.php?latex=C_%7Bi%7D%5E%7B%2B%7D%3D%5Cmax%5B0%2Cx_%7Bi%7D-%28%5Cmu_%7B0%7D%2BK%29%2BC_%7Bi-1%7D%5E%7B%2B%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,
,![C_{i}^{-}=\max[0,(\mu_{0}-K)-x_{i}+C_{i-1}^{-}]](https://s0.wp.com/latex.php?latex=C_%7Bi%7D%5E%7B-%7D%3D%5Cmax%5B0%2C%28%5Cmu_%7B0%7D-K%29-x_%7Bi%7D%2BC_%7Bi-1%7D%5E%7B-%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,初始值是
,初始值是  。当累计偏差
。当累计偏差  或者
或者  大于
大于  的时候,表示
的时候,表示  出现了异常,也就是 out of control。通过这个值,可以获得时间序列开始异常的时间。
出现了异常,也就是 out of control。通过这个值,可以获得时间序列开始异常的时间。 等时间戳。根据变化开始时间(change start time)
等时间戳。根据变化开始时间(change start time) ,例如 60 分钟(1 小时)。可以从两个时间段获取数据,正常时间段
,例如 60 分钟(1 小时)。可以从两个时间段获取数据,正常时间段  ,异常时间段
,异常时间段 ![[T_{c},T_{m}]](https://s0.wp.com/latex.php?latex=%5BT_%7Bc%7D%2CT_%7Bm%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,分别获取到数据
,分别获取到数据  和
和  ,前者是在变化开始时间之前的数据点,后者是在变化开始之后的数据点。于是,作者们通过概率值来计算变化程度
,前者是在变化开始时间之前的数据点,后者是在变化开始之后的数据点。于是,作者们通过概率值来计算变化程度  ,意思就是计算一个条件概率,在观察到
,意思就是计算一个条件概率,在观察到  ,在这里
,在这里  表示集合
表示集合  ,
, ,
, 表示上涨的程度,
表示上涨的程度, 表示下降的程度。如果不想处理连乘的话,则需要处理连加:
表示下降的程度。如果不想处理连乘的话,则需要处理连加: ,
, .
. ,其中
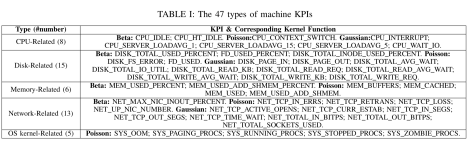
,其中  。在机器 KPIs 中,CPU 等指标可以用 Beta 分布;
。在机器 KPIs 中,CPU 等指标可以用 Beta 分布; ,在机器 KPIs 中,SYS_OOM 用于衡量超出内存的频率,可以用泊松分布来做。
,在机器 KPIs 中,SYS_OOM 用于衡量超出内存的频率,可以用泊松分布来做。 。
。
 和
和  两个值。
两个值。 个 KPIs,那么这台机器所对应的向量就是
个 KPIs,那么这台机器所对应的向量就是  。
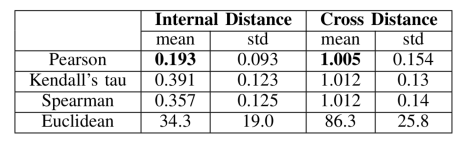
。![Y=[y_{1},\cdots,y_{n}]](https://s0.wp.com/latex.php?latex=Y%3D%5By_%7B1%7D%2C%5Ccdots%2Cy_%7Bn%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,
, 其中
其中  ,
, 。
。 且
且  ) 或者 (
) 或者 ( 且
且  ),那么称之为 concordant;如果 (
),那么称之为 concordant;如果 ( 或者
或者  ,则既不是 concordant,也不是 discordant。那么 Kendall tau 定义为
,则既不是 concordant,也不是 discordant。那么 Kendall tau 定义为 ![[\text{(number of concordant pairs)}-\text{(number of disordant paris)}] / [n(n-1)/2]](https://s0.wp.com/latex.php?latex=%5B%5Ctext%7B%28number+of+concordant+pairs%29%7D-%5Ctext%7B%28number+of+disordant+paris%29%7D%5D+%2F+%5Bn%28n-1%29%2F2%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
 ,后者表示
,后者表示  的位置,称之为秩次(rank),得到序列
的位置,称之为秩次(rank),得到序列 ![X'=[x_{1}',\cdots,x_{n}']](https://s0.wp.com/latex.php?latex=X%27%3D%5Bx_%7B1%7D%27%2C%5Ccdots%2Cx_%7Bn%7D%27%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 。对原始序列
。对原始序列 ![Y'=[y_{1}',\cdots,y_{n}']](https://s0.wp.com/latex.php?latex=Y%27%3D%5By_%7B1%7D%27%2C%5Ccdots%2Cy_%7Bn%7D%27%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 。一个相同的值在一列数据中必须有相同的秩次,那么在计算中采用的秩次就是数值在按从大到小排列时所在位置的平均值。如果没有相同的 rank,那么使用公式
。一个相同的值在一列数据中必须有相同的秩次,那么在计算中采用的秩次就是数值在按从大到小排列时所在位置的平均值。如果没有相同的 rank,那么使用公式  进行计算,其中
进行计算,其中  ;如果存在相同的秩次,则对
;如果存在相同的秩次,则对  。
。

 或者
或者 
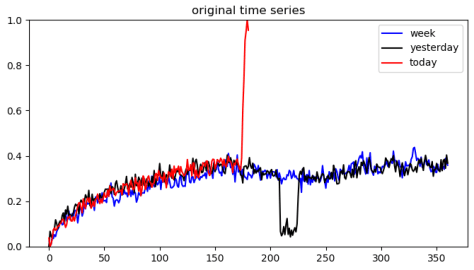
![[x_{1},x_{2}, \cdots, x_{n}]](https://s0.wp.com/latex.php?latex=%5Bx_%7B1%7D%2Cx_%7B2%7D%2C+%5Ccdots%2C+x_%7Bn%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 表示原始的时间序列的话,标准化指的是
表示原始的时间序列的话,标准化指的是  ,其中
,其中  和
和  ,其中
,其中  分别表示这段时间内的最大值与最小值。
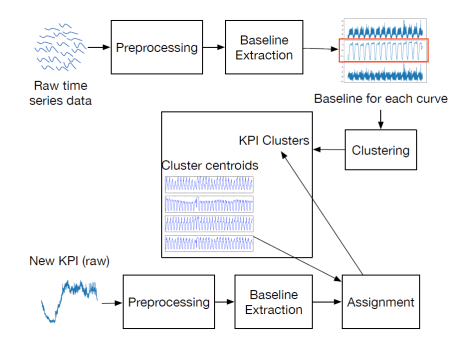
分别表示这段时间内的最大值与最小值。![[x_{1},x_{2},\cdots,x_{n}]](https://s0.wp.com/latex.php?latex=%5Bx_%7B1%7D%2Cx_%7B2%7D%2C%5Ccdots%2Cx_%7Bn%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,基线提取就是:
,基线提取就是:
 分别指的是
分别指的是  来提取基线。假设时间序列是
来提取基线。假设时间序列是 ![[x_{1},\cdots,x_{n}]](https://s0.wp.com/latex.php?latex=%5Bx_%7B1%7D%2C%5Ccdots%2Cx_%7Bn%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,
, ,
, 。也就是说
。也就是说  。
。![X = [x_{1},\cdots,x_{m}]](https://s0.wp.com/latex.php?latex=X+%3D+%5Bx_%7B1%7D%2C%5Ccdots%2Cx_%7Bm%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 和
和 ![Y = [y_{1},\cdots,y_{m}]](https://s0.wp.com/latex.php?latex=Y+%3D+%5By_%7B1%7D%2C%5Ccdots%2Cy_%7Bm%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 而言,为了解决左右平移的问题,需要考虑一个偏移量
而言,为了解决左右平移的问题,需要考虑一个偏移量  ,然后计算它们之间的内积。
,然后计算它们之间的内积。


![NCC \in [-1,1]](https://s0.wp.com/latex.php?latex=NCC+%5Cin+%5B-1%2C1%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 指的是 Normalized version of Cross-Correlation,
指的是 Normalized version of Cross-Correlation,![SBD \in [0,2]](https://s0.wp.com/latex.php?latex=SBD+%5Cin+%5B0%2C2%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 指的是 Shape-based distance。
指的是 Shape-based distance。
![X=[x_{1},\cdots, x_{n}]](https://s0.wp.com/latex.php?latex=X%3D%5Bx_%7B1%7D%2C%5Ccdots%2C+x_%7Bn%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 和
和 ![Y = [y_{1},\cdots, y_{n}]](https://s0.wp.com/latex.php?latex=Y+%3D+%5By_%7B1%7D%2C%5Ccdots%2C+y_%7Bn%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,那么以下陈述是等价的。
,那么以下陈述是等价的。 使得二维点集
使得二维点集  能够被很好的拟合好,也就是说此刻的方差较小。
能够被很好的拟合好,也就是说此刻的方差较小。![[y_{1},\cdots,y_{n}]](https://s0.wp.com/latex.php?latex=%5By_%7B1%7D%2C%5Ccdots%2Cy_%7Bn%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 的 Pearson 系数很高;
的 Pearson 系数很高; 使得
使得 ![[x_{1}/\mu_{1},\cdots,x_{n}/\mu_{1}]](https://s0.wp.com/latex.php?latex=%5Bx_%7B1%7D%2F%5Cmu_%7B1%7D%2C%5Ccdots%2Cx_%7Bn%7D%2F%5Cmu_%7B1%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 与
与 ![[y_{1}/\mu_{2},\cdots,y_{n}/\mu_{2}]](https://s0.wp.com/latex.php?latex=%5By_%7B1%7D%2F%5Cmu_%7B2%7D%2C%5Ccdots%2Cy_%7Bn%7D%2F%5Cmu_%7B2%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 几乎一致。
几乎一致。





 和
和  来表示,也就是说:
来表示,也就是说:



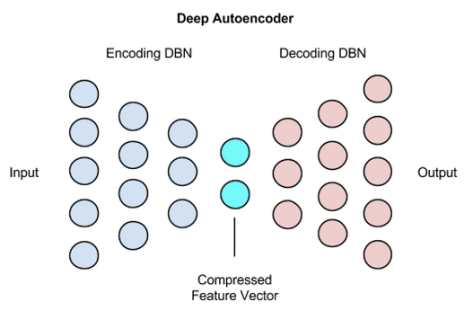
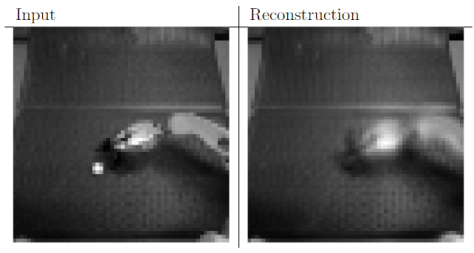
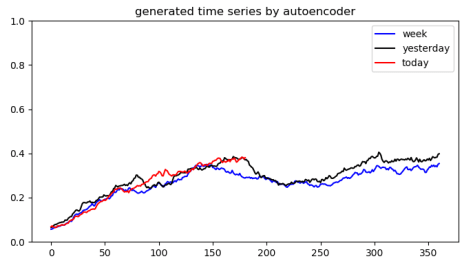
 ,并且编码器和解码器都是前馈神经网络,也就是说:
,并且编码器和解码器都是前馈神经网络,也就是说:

 其中
其中 

 和
和  分别是编码层和解码层的激活函数,
分别是编码层和解码层的激活函数, 和
和  分别是编码层和解码层的矩阵和相应的向量。具体来说它们的矩阵大小分别是
分别是编码层和解码层的矩阵和相应的向量。具体来说它们的矩阵大小分别是 
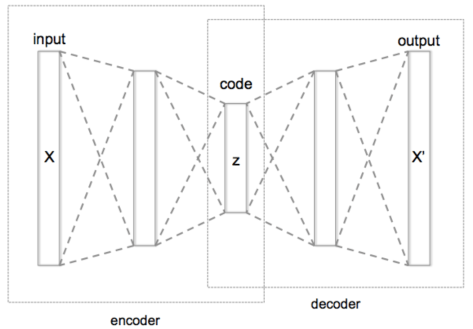
 一定是要小于输入层的维度
一定是要小于输入层的维度  的。
的。 ,那么令
,那么令 

 就可以得到一个自编码器,而这个自编码器对于提取特征没有任何的意义。同理,当
就可以得到一个自编码器,而这个自编码器对于提取特征没有任何的意义。同理,当  时,
时, 是一个
是一个  矩阵,
矩阵, 是一个
是一个  矩阵。从线性代数的角度来看,有无数个矩阵
矩阵。从线性代数的角度来看,有无数个矩阵  满足
满足  。这种情况下对于提取特征也是没有意义的。而当
。这种情况下对于提取特征也是没有意义的。而当  时,其实无法找到矩阵
时,其实无法找到矩阵  使得
使得  如果存在
如果存在  那么
那么








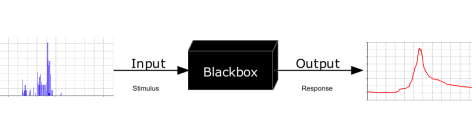
 和
和  等都是白盒函数。
等都是白盒函数。 而言,我们都可以研究该函数的以下性质:
而言,我们都可以研究该函数的以下性质: 和
和 

 而言,多项式的根指的是使得
而言,多项式的根指的是使得  的
的  的解。特别的,对于二次多项式而言,也就是
的解。特别的,对于二次多项式而言,也就是  它的根可以表示为:
它的根可以表示为:
 这个集合。下面我们来介绍一下如何计算一个函数的根。
这个集合。下面我们来介绍一下如何计算一个函数的根。![[a,b],](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D%2C&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 而且通过
而且通过  与
与  两点,它也必定通过区间
两点,它也必定通过区间 ![[a,b]](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 内的任意一点
内的任意一点  其中
其中 
 和
和  那么必定存在
那么必定存在  使得
使得  。根据这个定理,我们可以提出二分法来计算函数的根。
。根据这个定理,我们可以提出二分法来计算函数的根。 的解,其一般步骤是:
的解,其一般步骤是:
 并求出
并求出  的取值;
的取值; 那么
那么  就选择
就选择 ![[m,b]](https://s0.wp.com/latex.php?latex=%5Bm%2Cb%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 为新的区间,否则选择
为新的区间,否则选择 ![[a,m]](https://s0.wp.com/latex.php?latex=%5Ba%2Cm%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 为新的区间;
为新的区间;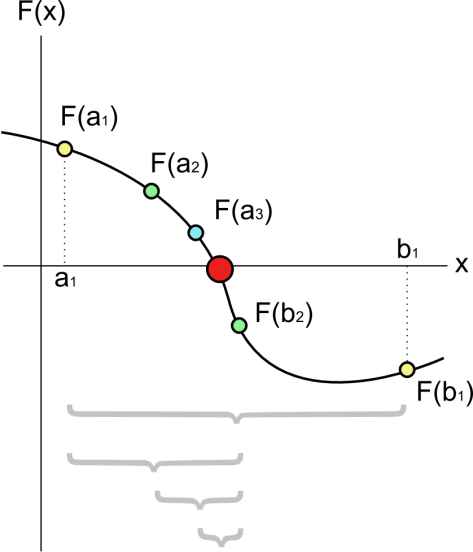
 计算这个点相应的函数取值
计算这个点相应的函数取值  与导数值
与导数值  然后写出通过点
然后写出通过点  的切线方程,并且计算出该切线与横轴的交点
的切线方程,并且计算出该切线与横轴的交点  i.e.
i.e.

 随着
随着  的解。
的解。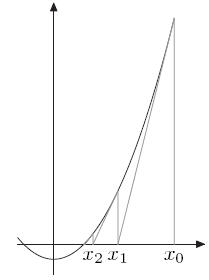

 的时候,可以用右侧的式子来估计导数值,i.e.
的时候,可以用右侧的式子来估计导数值,i.e.

 并且它们距离函数
并且它们距离函数 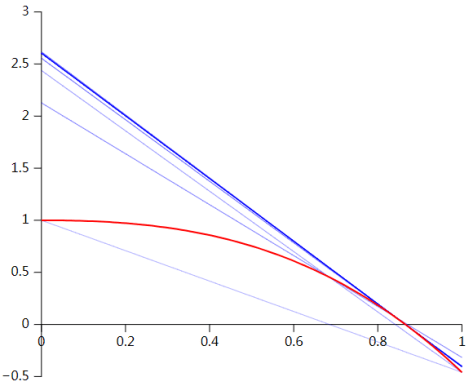
 然后令
然后令  就可以得到函数的临界点(critical point),再根据周围的点导数的性质即可判断这个点是否是局部最大值或者局部最小值。
就可以得到函数的临界点(critical point),再根据周围的点导数的性质即可判断这个点是否是局部最大值或者局部最小值。 这
这  个样本。根据 Weierstrass 逼近定理可以知道:
个样本。根据 Weierstrass 逼近定理可以知道: 的连续函数可以用三角函数级数一致逼近。
的连续函数可以用三角函数级数一致逼近。 ,存在一个多项式
,存在一个多项式  使得对于任意的
使得对于任意的 ![x\in[a,b],](https://s0.wp.com/latex.php?latex=x%5Cin%5Ba%2Cb%5D%2C&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 有
有
 那么我们可以找到一个多项式
那么我们可以找到一个多项式  对每一个
对每一个  都成立。根据计算,可以得到该多项式是:
都成立。根据计算,可以得到该多项式是:


 ,每一个粒子
,每一个粒子  都是
都是  。在每一轮迭代中,需要更新两个最值,分别是每一个粒子在历史上的最优值和所有粒子在历史上的最优值,分别记为
。在每一轮迭代中,需要更新两个最值,分别是每一个粒子在历史上的最优值和所有粒子在历史上的最优值,分别记为  (
( )和
)和  。在第
。在第  次迭代的时候,
次迭代的时候,![\bold{v}_{i}(t+1) = \bold{v}_{i}(t) + c r_{1}[\bold{x}_{i}^{*}(t) - \bold{x}_{i}(t)] + c r_{2}[\bold{x}^{g}(t) - \bold{x}_{i}(t)],](https://s0.wp.com/latex.php?latex=%5Cbold%7Bv%7D_%7Bi%7D%28t%2B1%29+%3D+%5Cbold%7Bv%7D_%7Bi%7D%28t%29+%2B+c+r_%7B1%7D%5B%5Cbold%7Bx%7D_%7Bi%7D%5E%7B%2A%7D%28t%29+-+%5Cbold%7Bx%7D_%7Bi%7D%28t%29%5D+%2B+c+r_%7B2%7D%5B%5Cbold%7Bx%7D%5E%7Bg%7D%28t%29+-+%5Cbold%7Bx%7D_%7Bi%7D%28t%29%5D%2C&bg=ffffff&fg=2b2b2b&s=0&c=20201002)

 ,并且
,并且  是
是 ![[0,1]](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 中间的随机数。
中间的随机数。
 这个维度,当温度
这个维度,当温度  。假设目标函数是
。假设目标函数是  需要寻找
需要寻找  ,然后执行以下的程序:
,然后执行以下的程序: ;
; ,
, ,也就是
,也就是  ,选择
,选择  ;
; 的概率来接受
的概率来接受  。
。 。
。 ,
, 。按照其递归公式来计算,我们可以详细写出前面的几项,那就是:
。按照其递归公式来计算,我们可以详细写出前面的几项,那就是:

 的矩阵 A 能够对角化,那就是存在可逆矩阵 P 使得
的矩阵 A 能够对角化,那就是存在可逆矩阵 P 使得


 表示一个
表示一个  。如果把矩阵 P 写成列向量的形式,i.e.
。如果把矩阵 P 写成列向量的形式,i.e.  ,那么以上的矩阵方程就可以转换为
,那么以上的矩阵方程就可以转换为  ,
,  。进一步来说,如果要计算矩阵 A 的幂,就可以得到:
。进一步来说,如果要计算矩阵 A 的幂,就可以得到:
 的多项式的解,
的多项式的解,
 ,
, 和
和  ,它们所对应的特征向量分别是:
,它们所对应的特征向量分别是: .
. .
. 具有弱平稳性(Weak Stationary)指的是:
具有弱平稳性(Weak Stationary)指的是: 对于所有的
对于所有的  都是恒定的;
都是恒定的; 对于所有的
对于所有的  与
与  的协方差对于所有的
的协方差对于所有的  ,可以定义 ACF 为
,可以定义 ACF 为 .
. .
. 时刻的取值
时刻的取值  时刻的取值
时刻的取值  相关,其公式就是:
相关,其公式就是: ,
, ,并且
,并且  满足 iid 条件。其中
满足 iid 条件。其中  表示 Gauss 正态分布,它的均值是0,方差是
表示 Gauss 正态分布,它的均值是0,方差是  。
。 是弱平稳的,i.e. 必须满足
是弱平稳的,i.e. 必须满足  。
。 ,则可以得到一些 AR(1) 模型的例子如下图所示:
,则可以得到一些 AR(1) 模型的例子如下图所示: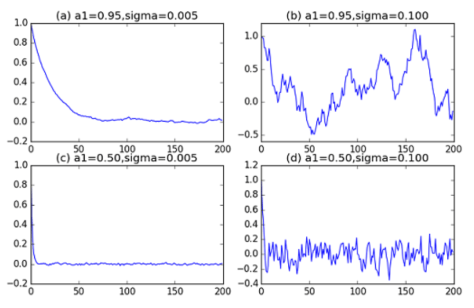
 .
. .
. .
. ,
,
 ,
, .
. . 从
. 从 

 .
. 对于所有的
对于所有的  都成立。也就是可以写成一个一维函数的迭代公式:
都成立。也就是可以写成一个一维函数的迭代公式:
 的收敛性,这里的
的收敛性,这里的  表示函数
表示函数  ,
, ,可以得到
,可以得到  。这与
。这与  ,可以从公式上得到
,可以从公式上得到  当
当 

 .
. ,我们可以得到
,我们可以得到  . i.e.
. i.e.  .
.
 .
. as
as 


 并且忽略误差项,因此可以得到简化版的模型形如:
并且忽略误差项,因此可以得到简化版的模型形如: .
.
 ,求解可以得到
,求解可以得到  ,i.e.
,i.e.  。当
。当  都在单位圆内部的时候,也就是该模型
都在单位圆内部的时候,也就是该模型  满足稳定性的条件。
满足稳定性的条件。


 ,该 p 阶差分方程
,该 p 阶差分方程
 和余弦函数
和余弦函数  ,只是平移了
,只是平移了  个长度而已。本文将会介绍一些基于形状的时间序列的距离算法,并且介绍如何在给定时间序列的情况下,在时间序列数据库中寻找相似的时间序列。
个长度而已。本文将会介绍一些基于形状的时间序列的距离算法,并且介绍如何在给定时间序列的情况下,在时间序列数据库中寻找相似的时间序列。 和
和  。首先我们可以建立一个
。首先我们可以建立一个  的矩阵,
的矩阵, 位置的元素是
位置的元素是  ,这里的 dist 可以使用
,这里的 dist 可以使用  范数。其次,我们想找到一条路径,使得这个矩阵的累积距离最小,而这条路则是两条时间序列之间的最佳匹配。在这里,我们可以假设这条路径是
范数。其次,我们想找到一条路径,使得这个矩阵的累积距离最小,而这条路则是两条时间序列之间的最佳匹配。在这里,我们可以假设这条路径是  ,其中
,其中  的每个元素表示时间序列 Q 中的第 i 个元素和时间序列 C 中的第 j 个元素之间的距离. i.e.
的每个元素表示时间序列 Q 中的第 i 个元素和时间序列 C 中的第 j 个元素之间的距离. i.e.  。
。
 .
. ,有
,有


 最终的取值
最终的取值  就是我们需要的解,也就是两条时间序列的 DTW 距离。按照上面的算法,DTW 算法的时间复杂度是
就是我们需要的解,也就是两条时间序列的 DTW 距离。按照上面的算法,DTW 算法的时间复杂度是  。特别地,
。特别地, 时,则
时,则  表示最后的距离;
表示最后的距离; 时,则
时,则  时,则
时,则  表示最后的距离。
表示最后的距离。 ,则
,则
![q[i]](https://s0.wp.com/latex.php?latex=q%5Bi%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 与
与 ![c[j]](https://s0.wp.com/latex.php?latex=c%5Bj%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 的话,i 与 j 需要满足
的话,i 与 j 需要满足  ,这里的 w 表示窗口长度。因此算法的描述如下:
,这里的 w 表示窗口长度。因此算法的描述如下:
 取值范围是:对每一个
取值范围是:对每一个  ,需要
,需要  。
。 和一个时间序列的数据库
和一个时间序列的数据库  。通过某种相似度或者距离计算方法,计算出给定的时间序列
。通过某种相似度或者距离计算方法,计算出给定的时间序列  中最相似的时间序列。
中最相似的时间序列。 。从数据库
。从数据库 

 .
. ,给定一个窗口的取值 r,得到
,给定一个窗口的取值 r,得到  ,
, 。
。

 ,有不等式
,有不等式  成立。
成立。 .
. 在 [0,1] 区间上与 X 坐标轴所夹的图形面积,就使用了 Riemann 积分的思想。 他把 [0,1] 区间等长地切割成 n 段,每一段使用一个长方形去逼近
在 [0,1] 区间上与 X 坐标轴所夹的图形面积,就使用了 Riemann 积分的思想。 他把 [0,1] 区间等长地切割成 n 段,每一段使用一个长方形去逼近 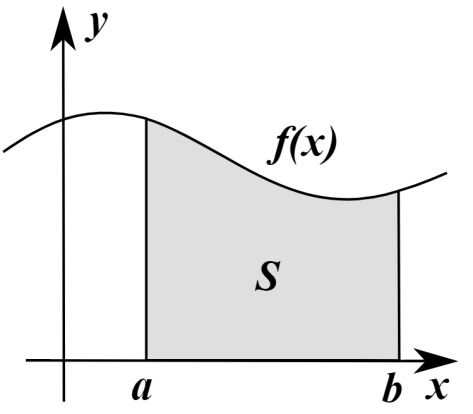
 ,
, 表示这些区间长度的最大值,在这里
表示这些区间长度的最大值,在这里  。在每一个子区间上
。在每一个子区间上![[x_{i},x_{i+1}]](https://s0.wp.com/latex.php?latex=%5Bx_%7Bi%7D%2Cx_%7Bi%2B1%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 上取出一个点
上取出一个点 ![t_{i}\in[x_{i},x_{i+1}]](https://s0.wp.com/latex.php?latex=t_%7Bi%7D%5Cin%5Bx_%7Bi%7D%2Cx_%7Bi%2B1%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 。而函数
。而函数 
 使得对于任意取样分割,当
使得对于任意取样分割,当  时,就有
时,就有
 .
.


 ,这里的
,这里的  是系数,
是系数, 是可测集合,
是可测集合, 表示指示函数。当
表示指示函数。当 
 上的 Lebesgue 积分是:
上的 Lebesgue 积分是: ,
, 表示零函数,这里的大小关系表示对定义域内的每个点都要成立。
表示零函数,这里的大小关系表示对定义域内的每个点都要成立。 ,而这里的
,而这里的  和
和  都是非负可测函数。所以可以定义任意可测函数的 Lebesgue 积分如下:
都是非负可测函数。所以可以定义任意可测函数的 Lebesgue 积分如下: .
.![(R)\int_{a}^{b}f(x)dx = (L)\int_{[a,b]}f(x)dx](https://s0.wp.com/latex.php?latex=%28R%29%5Cint_%7Ba%7D%5E%7Bb%7Df%28x%29dx+%3D+%28L%29%5Cint_%7B%5Ba%2Cb%5D%7Df%28x%29dx&bg=ffffff&fg=2b2b2b&s=1&c=20201002) .
. ;
; .
. ,无法画出函数图像,它不是 Riemann 可积的,但是它 Lebesgue 可积。
,无法画出函数图像,它不是 Riemann 可积的,但是它 Lebesgue 可积。 这样的定义域而已。所以,之前所讨论的很多连续函数的想法都可以应用在时间序列上。
这样的定义域而已。所以,之前所讨论的很多连续函数的想法都可以应用在时间序列上。 用
用  来表示,其中
来表示,其中  。那么后者就是原始序列的一种表示(representation)。
。那么后者就是原始序列的一种表示(representation)。 ,定义 PAA 的序列是:
,定义 PAA 的序列是: ,
, .
. 。用图像来表示那就是:
。用图像来表示那就是: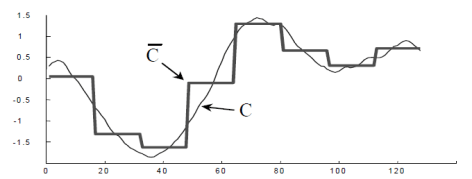
 的定义上稍作修改即可。
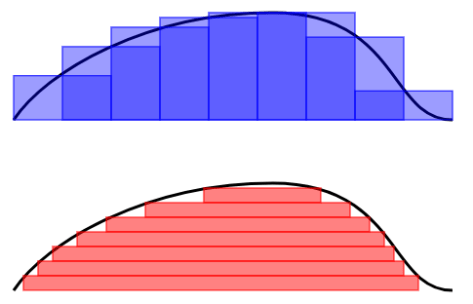
的定义上稍作修改即可。 ,用
,用 来表示 Gauss 曲线下方的一些点,而这些点把 Gauss 曲线下方的面积等分成了
来表示 Gauss 曲线下方的一些点,而这些点把 Gauss 曲线下方的面积等分成了  表示
表示  。
。 ,那么
,那么  ;如果
;如果  ,那么
,那么  ,在这里
,在这里  ;如果
;如果  ,那么
,那么  。
。
 .
.
 表示时间序列 X 的取值落在第 k 个桶的比例(概率),maxbin 表示桶的个数,len(X) 表示时间序列 X 的长度。
表示时间序列 X 的取值落在第 k 个桶的比例(概率),maxbin 表示桶的个数,len(X) 表示时间序列 X 的长度。 上的距离函数定义为
上的距离函数定义为  ,其中
,其中  表示实数集合,并且函数
表示实数集合,并且函数  满足以下几个条件:
满足以下几个条件: ,并且
,并且  当且仅当
当且仅当  ;
; ,也就是满足对称性;
,也就是满足对称性; ,也就是三角不等式。
,也就是三角不等式。 (其中
(其中  或者
或者  )上的向量空间
)上的向量空间  与一个内积(映射)所构成,
与一个内积(映射)所构成, ,它满足以下设定:
,它满足以下设定: ,有
,有 





 的映射:
的映射: 是同构映射。
是同构映射。 和
和  ,于是可以使用欧几里德空间里面的
,于是可以使用欧几里德空间里面的 




 ,
,  。
。 ,则
,则  表是它们是完全一致的,如果两条时间序列
表是它们是完全一致的,如果两条时间序列  ,则
,则  表示它们之间是负相关的。
表示它们之间是负相关的。 .
.

 .
.
 的性质:
的性质:
 表示两条时间序列持有类似的趋势, 它们会同时上涨或者下跌,并且涨幅或者跌幅也是类似的。
表示两条时间序列持有类似的趋势, 它们会同时上涨或者下跌,并且涨幅或者跌幅也是类似的。 表示两条时间序列的上涨和下跌趋势恰好相反。
表示两条时间序列的上涨和下跌趋势恰好相反。 表示两条时间序列在单调性方面没有相关性。
表示两条时间序列在单调性方面没有相关性。![d_{CORT}(X_{T},Y_{T}) = \phi_{k}[CORT(X_{T},Y_{T})]\cdot d(X_{T},Y_{T}),](https://s0.wp.com/latex.php?latex=d_%7BCORT%7D%28X_%7BT%7D%2CY_%7BT%7D%29+%3D+%5Cphi_%7Bk%7D%5BCORT%28X_%7BT%7D%2CY_%7BT%7D%29%5D%5Ccdot+d%28X_%7BT%7D%2CY_%7BT%7D%29%2C&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
 可以用
可以用  来计算,而
来计算,而
 ,可以定义自相关系数为:
,可以定义自相关系数为: ,
, 分别表示该时间序列的均值和方差。该公式相当于是比较整个时间序列
分别表示该时间序列的均值和方差。该公式相当于是比较整个时间序列  的两个子序列的相似度(Pearson 系数),这两个子序列分别是
的两个子序列的相似度(Pearson 系数),这两个子序列分别是  和
和  。
。 ,可以对每一个时间序列得到一组自相关系数的向量,用公式描述如下:
,可以对每一个时间序列得到一组自相关系数的向量,用公式描述如下:

 的情况,可以假定
的情况,可以假定  和
和  。于是,可以定义时间序列之间的距离如下:
。于是,可以定义时间序列之间的距离如下: .
. 表示一个
表示一个  的矩阵。它有着很多种选择,例如:
的矩阵。它有着很多种选择,例如: 表示单位矩阵。用公式表示就是
表示单位矩阵。用公式表示就是 .
. 表示一个
表示一个  。此时相当于一个带权重的求和公式。
。此时相当于一个带权重的求和公式。 .
. 和
和  两个距离公式。
两个距离公式。 ,
, .
. ,
, ,
,![n=[(T-1)/2]](https://s0.wp.com/latex.php?latex=n%3D%5B%28T-1%29%2F2%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 。这里的
。这里的 ![[\cdot]](https://s0.wp.com/latex.php?latex=%5B%5Ccdot%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 表示 Gauss 取整函数。
表示 Gauss 取整函数。 .
. ,
, ,
, ,
, 和
和  表示
表示  的标准差(sample variance)。
的标准差(sample variance)。 .
. 模型有自己的 AR 表示,因此可以得到相应的一组参数
模型有自己的 AR 表示,因此可以得到相应的一组参数  ,所以,对于每一条时间序列,都可以用一组最优的参数去逼近。如果
,所以,对于每一条时间序列,都可以用一组最优的参数去逼近。如果

 和
和  对于时间序列
对于时间序列  和
和  的参数估计,则 Piccolo 距离如下:
的参数估计,则 Piccolo 距离如下: ,
, ,
, 当
当  ,并且
,并且  当
当  。
。 当
当  ,并且
,并且  当
当  。
。
 和
和  表示
表示  模型对于
模型对于  ,
, 和
和  表示时间序列的方差,
表示时间序列的方差, 和
和  表示时间序列的 sample covariance 矩阵。
表示时间序列的 sample covariance 矩阵。 的结构,i.e.
的结构,i.e.  ,这里的
,这里的  表示 AR 模型的参数,
表示 AR 模型的参数, 表示白噪声(均值为 0,方差为 1 的 Gauss 正态分布)。于是可以从这些参数定义 LPC 系数如下:
表示白噪声(均值为 0,方差为 1 的 Gauss 正态分布)。于是可以从这些参数定义 LPC 系数如下: ,
, 当
当  ,
, 当
当  。
。 .
. 范数的距离,基于相关性的距离,基于周期图表的计算方法,基于模型的计算方法。
范数的距离,基于相关性的距离,基于周期图表的计算方法,基于模型的计算方法。

![\text{skewness}(X) = E[(\frac{X-\mu}{\sigma})^{3}]=\frac{1}{T}\sum_{i=1}^{T}\frac{(x_{i}-\mu)^{3}}{\sigma^{3}},](https://s0.wp.com/latex.php?latex=%5Ctext%7Bskewness%7D%28X%29+%3D+E%5B%28%5Cfrac%7BX-%5Cmu%7D%7B%5Csigma%7D%29%5E%7B3%7D%5D%3D%5Cfrac%7B1%7D%7BT%7D%5Csum_%7Bi%3D1%7D%5E%7BT%7D%5Cfrac%7B%28x_%7Bi%7D-%5Cmu%29%5E%7B3%7D%7D%7B%5Csigma%5E%7B3%7D%7D%2C&bg=ffffff&fg=2b2b2b&s=1&c=20201002)
![\text{kurtosis}(X) = E[(\frac{X-\mu}{\sigma})^{4}]=\frac{1}{T}\sum_{i=1}^{T}\frac{(x_{i}-\mu)^{4}}{\sigma^{4}} .](https://s0.wp.com/latex.php?latex=%5Ctext%7Bkurtosis%7D%28X%29+%3D+E%5B%28%5Cfrac%7BX-%5Cmu%7D%7B%5Csigma%7D%29%5E%7B4%7D%5D%3D%5Cfrac%7B1%7D%7BT%7D%5Csum_%7Bi%3D1%7D%5E%7BT%7D%5Cfrac%7B%28x_%7Bi%7D-%5Cmu%29%5E%7B4%7D%7D%7B%5Csigma%5E%7B4%7D%7D+.&bg=ffffff&fg=2b2b2b&s=1&c=20201002)

![[\min(X_{T}), \max(X_{T})]](https://s0.wp.com/latex.php?latex=%5B%5Cmin%28X_%7BT%7D%29%2C+%5Cmax%28X_%7BT%7D%29%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 这个区间等分为十个小区间,那么时间序列的取值就会分散在这十个桶中。根据这个等距分桶的情况,就可以计算出这个概率分布的熵(entropy)。i.e. Binned Entropy 就可以定义为:
这个区间等分为十个小区间,那么时间序列的取值就会分散在这十个桶中。根据这个等距分桶的情况,就可以计算出这个概率分布的熵(entropy)。i.e. Binned Entropy 就可以定义为: 表示桶的个数,
表示桶的个数, 表示时间序列
表示时间序列  的长度是
的长度是  ,同时 Approximate Entropy 函数拥有两个参数,
,同时 Approximate Entropy 函数拥有两个参数, ,下面来详细介绍 Approximate Entropy 的算法细节。
,下面来详细介绍 Approximate Entropy 的算法细节。


 ,可以计算出哪些向量与
,可以计算出哪些向量与  较为相似。i.e.
较为相似。i.e.
 范数。
范数。

 会基于具体的时间序列具体调整;
会基于具体的时间序列具体调整;

 表示集合的元素个数。根据度量
表示集合的元素个数。根据度量  )的定义可以知道
)的定义可以知道 ,因此 Sample Entropy 总是非负数,i.e.
,因此 Sample Entropy 总是非负数,i.e.
 .
.
 ,这里n表示有n个事件发生。时间序列(S)表示为
,这里n表示有n个事件发生。时间序列(S)表示为 ,这里的m表示时间序列的长度。时间序列的时间戳可以选择一个等差序列,等差用
,这里的m表示时间序列的长度。时间序列的时间戳可以选择一个等差序列,等差用 来表示,并且
来表示,并且 ,and
,and  +
+ 来表示某个事件,
来表示某个事件, 表示序列S在事件
表示序列S在事件 表示序列S在事件
表示序列S在事件 和
和 应该是不一样的。
应该是不一样的。 ,当且仅当
,当且仅当 ,当且仅当
,当且仅当 (or
(or  )。如果
)。如果 (or
(or  )。
)。 来做例子,
来做例子, 是随机选择的,
是随机选择的, ,可以标记为
,可以标记为 ,其中
,其中 +
+ 。
。 when
when  when
when  。可以使用记号
。可以使用记号 ,其中
,其中 ,
, 是随机选择的。
是随机选择的。 而言,
而言, 表示
表示 中距离x最近的第r个元素,对于两个不相交的集合
中距离x最近的第r个元素,对于两个不相交的集合 和
和  ,可以定义方程:
,可以定义方程: when
when  ,
, when otherwise.
when otherwise. 表示x与x的第r个最近的邻居是否在同一个子集内。
表示x与x的第r个最近的邻居是否在同一个子集内。 ,
, 小,则说明两类samples
小,则说明两类samples  混合得非常好,表示无异常情况;如果
混合得非常好,表示无异常情况;如果 遵循标准Gauss分布,其参数是
遵循标准Gauss分布,其参数是 +
+ ,
,  +
+ ,
, +
+ ,
,  +
+ 有显著的不同,当
有显著的不同,当 ,在这里,参数可以按照以下标准设置:
,在这里,参数可以按照以下标准设置: for
for  ,
, for
for  。
。 并且它与
并且它与
 。
。 。
。 的概念。
的概念。 而言,其中n是E中的事件个数。
而言,其中n是E中的事件个数。 .
. ,可以得到
,可以得到  或者
或者  ,可以得到
,可以得到  或者
或者 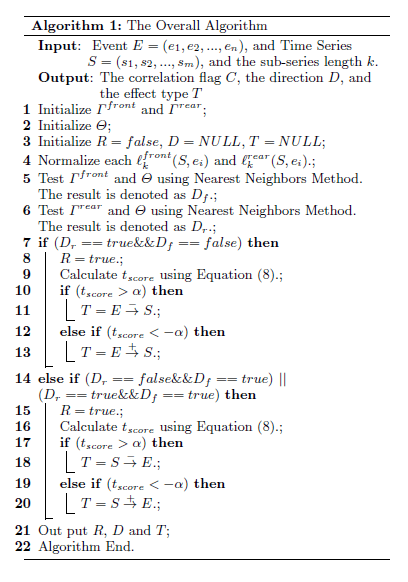
 是 True 表示
是 True 表示  是 True 表示
是 True 表示  ,其中p是样本的总个数。
,其中p是样本的总个数。


 is when a query is submitted;
is when a query is submitted;  is when the result HTML file has been downloaded;
is when the result HTML file has been downloaded;  is when a brower finishes parsing the HTML;
is when a brower finishes parsing the HTML;  is when the page is completely rendered. SRT is measured by
is when the page is completely rendered. SRT is measured by  , the user-received search response time.
, the user-received search response time. is the server response time of the HTML file, which is recorded by servers;
is the server response time of the HTML file, which is recorded by servers;  is the network transmission time of the HTML file;
is the network transmission time of the HTML file;  is the browser parsing time of the HTML;
is the browser parsing time of the HTML;  is the remaining time spent before the page is rendered, e.g. download time of images from image servers.
is the remaining time spent before the page is rendered, e.g. download time of images from image servers.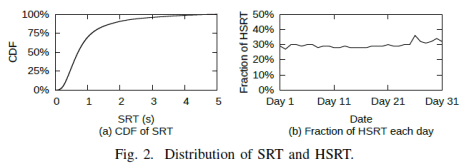
 ,
, affects SRT.
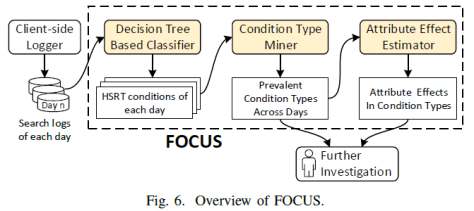
affects SRT. ? What SRT components (e.g.
? What SRT components (e.g.  and
and  to get a variant condition type
to get a variant condition type  . In the past days, we have the number of HSRT events in total, the number of HSRT events in condition
. In the past days, we have the number of HSRT events in total, the number of HSRT events in condition  . As a result, we believe the historical data based comparison can provide a reasonable estimate of the attribute effects. The comparison between
. As a result, we believe the historical data based comparison can provide a reasonable estimate of the attribute effects. The comparison between 
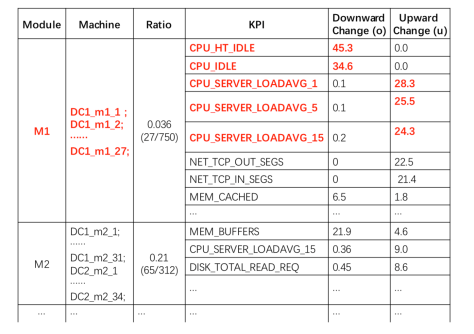
 (row 7)?
(row 7)? (row 5, 10, 11, 12)?
(row 5, 10, 11, 12)?