
异常值检测算法在数据挖掘的诸多领域有着应用场景,例如金融领域,信息传输领域,图像领域等。在研究过程中,有学者给出了异常点的一个定义:
An outlier is an observation that deviates so much from other observations as as to arouse suspicion that it was generated by a different mechanism.
RNN 算法的主要思想
在这篇文章中,我们将会介绍一个多层的前馈神经网络,该神经网络可以用来进行异常值的检测。这个神经网络模拟的是一个恒等映射,输入层的神经元个数和输出层的神经元个数是一样的。这类的神经网络被称为 Replicator Neural Networks (RNNs),请注意这里的 RNN 算法指的并不是 Recurrent Neural Networks(RNNs),而是 Replicator Neural Networks,尽管它们拥有着同样的缩写名字 RNNs。具体来说, Replicator Neural Networks (RNNs),或者说自编码器,是一个多层前馈的神经网络 (multi-layer feed-forward neural networks)。在 Replicator Neural Networks 中,输入的变量也是输出的变量,模型中间层节点的个数少于输入层和输出层节点的个数。这样的话,模型就起到了压缩数据和恢复数据的作用。
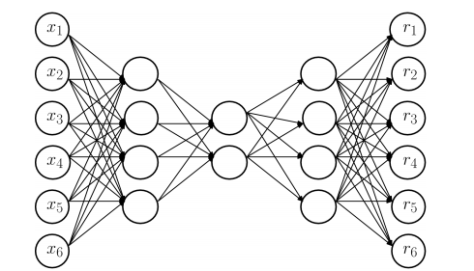
如图所示,这里的 RNNs 有三个隐藏层,输入层和输出层的节点个数都是6,第一个隐藏层和第三个隐藏层的节点个数(图中是4个节点)少于输入层,第二个隐藏层的节点个数是最少的(图中是2个节点)。在神经网络传输的时候,中间使用了 tanh 函数和 sigmoid 函数。这个神经网络是训练一个从输入层到输出层的恒等函数(identity mapping),传输的时候从输入层开始压缩数据,然后到了第二个隐藏层的时候开始解压数据。训练的目标就是使得整体的输出误差足够小,整体的误差是由所有的样本误差之和除以样本的个数得到的。由于图中只画出了6个特征,因此第 i 个样本的误差是

如果使用已经训练好的 RNN 模型,异常值的分数就可以定义为重构误差(reconstruction error)。
下面简要介绍一下 RNN 模型是如何构建的:
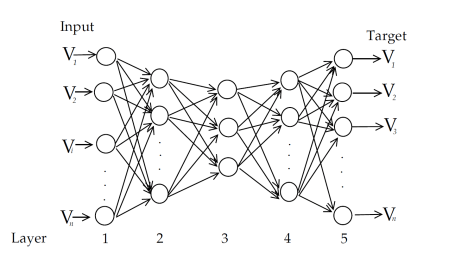
根据上图所示,左边的是输入层,右边的输出层。假设第 k 层中第 i 个神经元的输出是 



其中 


这里的 



在这里可以假设 


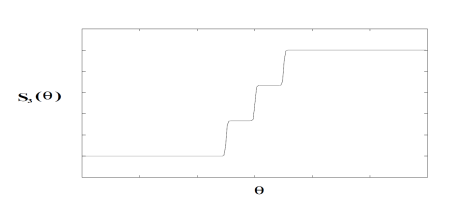
第三层的激活函数的输出就变成了 N 个离散的变量:0, 1/(N-1), 2/(N-1),…,1。这个阶梯型的激活函数是把第三层的连续输入值变成了一批离散的值。也就意味着把样本映射到了 N 个簇,那么 RNN 就可以计算出单个的异常点和一小簇的异常点。
备注:
根据上面的分析,可以看出如果按照以上算法,则不能使用反向传播算法来训练模型,原因是 


后向传播算法:
一般来说,为了训练神经网络模型,需要使用后向传播算法(back propagation),也简称为 BP 算法,或者误差逆传播算法(error back propagation)。在本文中,仅针对最简单的 RNN 模型介绍如何使用 BP 算法进行模型训练,至于多层的神经网络模型或者其他的神经网络模型,方法则是完全类似的。
给定训练集合 

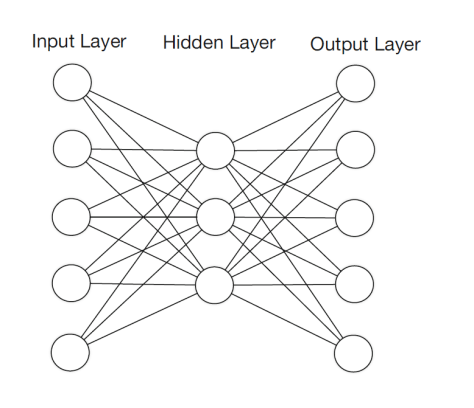
换句话说,输入样例是由 n 个属性描述,输出的结果也是 n 个属性。隐藏层只有一个,隐藏层的神经元个数是 ![q=[(n+1)/2]](https://s0.wp.com/latex.php?latex=q%3D%5B%28n%2B1%29%2F2%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)





记隐藏层第 h 个神经元接收到的输入为

写成矩阵形式就是:

记输出层第 j 个神经元接收到的输入为

其中 


输出层第 j 个神经元的输出是 

下面可以假定激活函数都使用 

对于训练集 





其中 

标准 BP 算法:
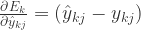
网络中有 个参数需要确定:输入层到隐藏层的 n*q 个权重值,隐藏层到输出层的 n*q 个权重值,q个隐层神经元的阈值,n 个输出层神经元的阈值。BP 算法是一个迭代学习算法,在迭代的每一轮采用了梯度下降法来进行参数的更新。任意参数的更新规则是


标准 BP 算法是根据每一个 

注意到 



根据定义 

根据定义 
根据定义 


所以可以计算出对于

如果假设

那么可以得到

因此对于

根据类似的想法,有

逐个计算:


由于



所以,



整理之后,任意参数 v 的更新式子是 





其中学习率 
标准 BP 算法的训练流程:
输入:训练集合 
过程:
1. 在 (0,1) 范围内随机神经网络中的所有连接权重和阈值
2. repeat
for all
根据当前参数,计算出当前的样本输出
计算输出层神经元的梯度项
计算隐藏层神经元的梯度项
更新连接权重 
end for
3. 达到停止条件
输出:链接权与阈值都确定的神经网络模型





累积 BP 算法:
BP 算法的目的是最小化训练集上的累计误差 
训练方法:
(1)把数据集合的每一列都进行归一化;
(2)选择 70% 的数据集合作为训练集合,30% 的数据集合作为验证集合。或者 训练集合 : 验证集合 = 8 : 2,这个需要根据情况而定。
(3)随机生成一个三层的神经网络结构,里面的权重都是随机生成,范围在 [0,1] 内。输入层的数据和输出层的数据保持一致,并且神经网络中间层的节点个数是输入层的一半。
(4)使用后向传播算法(back-propagation)来训练模型。为了防止神经网络的过拟合,通常有两种策略来防止这个问题。(i)第一种策略是“早停”(early stopping):当训练集合的误差降低,但是验证集合的误差增加时,则停止训练,同时返回具有最小验证集合误差的神经网络;(ii)第二种策略是“正则化”(regularization):基本思想是在误差目标函数中增加一个用于描述网络复杂度的部分,例如链接权和阀值的平方和。
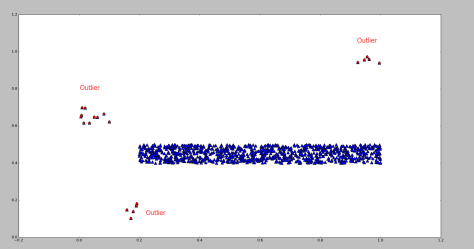
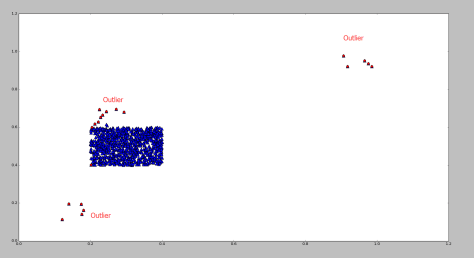
测试效果:
其中蓝色的点表示正常点,红色的点表示被 RNN 算法标记的异常点。
参考文献:
[1] Anomaly Detection Using Replicator Neural Networks Trained on Examples of One Class, Hoang Anh Dau, Vic Ciesielski, Andy Song
[2] Replicator Neural Networks for Outlier Modeling in Segmental Speech Recognition, Laszlo Toth and Gabor Gosztolya
[3] Outlier Detection Using Replicator Neural Networks, Simon Hawkins, Honxing He, Graham Williams and Rohan Baxter
