
一般的时间序列主要是在时间域中进行模型的研究,而对于混沌时间序列,无论是混沌不变量的计算,混沌模型的建立和预测都是在所谓的相空间中进行,因此相空间重构就是混沌时间序列处理中非常重要的一个步骤。所谓混沌序列,可以看作是考察混沌系统所得到的一组随着时间而变化的观察值。假设时间序列是




1981年Takens提出嵌入定理:对于无限长,无噪声的


1. 相空间重构
相空间重构技术有两个关键的参数:嵌入的维数
关于嵌入维数
(1) 延迟时间的确定:
如果延迟时间

中的两个坐标分量


(1.1) 自相关系数法:
自相关函数是求延迟时间

此时就可以使用已知的数据







(1.2) 交互信息法:
在考虑了以上方法的局限性之后,Fraser和Swinney提出了交互信息法(Mutual Information Method)。假设两个离散信息系统




其中



其中

这里的


现在,我们通过信息论的方法来计算延迟时间








交互信息法的关键在于怎么计算联合概率分布

令







如果


![Row[i]](https://s0.wp.com/latex.php?latex=Row%5Bi%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
如果


![Col[j]](https://s0.wp.com/latex.php?latex=Col%5Bj%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)

![P_{S}(i)=Row[i]/(n-\tau), 1\leq i\leq M_{1},](https://s0.wp.com/latex.php?latex=P_%7BS%7D%28i%29%3DRow%5Bi%5D%2F%28n-%5Ctau%29%2C+1%5Cleq+i%5Cleq+M_%7B1%7D%2C&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
![P_{Q}(j)=Col[j]/(n-\tau), 1\leq j\leq M_{2}.](https://s0.wp.com/latex.php?latex=P_%7BQ%7D%28j%29%3DCol%5Bj%5D%2F%28n-%5Ctau%29%2C+1%5Cleq+j%5Cleq+M_%7B2%7D.&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
如果



![Together[i][j]](https://s0.wp.com/latex.php?latex=Together%5Bi%5D%5Bj%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
![P_{S,Q}(i,j)=Together[i][j]/(n-\tau)^{2}, 1\leq i\leq M_{1}, 1\leq j\leq M_{2}.](https://s0.wp.com/latex.php?latex=P_%7BS%2CQ%7D%28i%2Cj%29%3DTogether%5Bi%5D%5Bj%5D%2F%28n-%5Ctau%29%5E%7B2%7D%2C+1%5Cleq+i%5Cleq+M_%7B1%7D%2C+1%5Cleq+j%5Cleq+M_%7B2%7D.&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
根据以上信息论的公式,可以得到:



交互信息曲线
(2) 嵌入维数的确定:
(2.1) 几何不变量法:
为了确定嵌入维数
(2.2) 虚假最临近点法:
从几何的观点来看,混沌时间序列是高维相空间混沌运动的轨迹在一维空间的投影,在这个投影的过程中,混沌运动的轨迹就会被扭曲。高维相空间并不相邻的两个点投影到一维空间上有的时候就会成为相邻的两点,也就是虚假邻点。重构相空间,实际上就是从混沌时间序列中恢复混沌运动的轨迹,随着嵌入维数的增大,混沌运动的轨道就会被打开,虚假邻点就会被逐渐剔除,从而整个混沌运动的轨迹得到恢复,这个思想就是虚假最临近点法的关键。
在

都有一个欧几里德距离的最邻近点

当相空间的维数从


如果


如果![a_{1}(i,d)>R_{\tau} \in [10,50],](https://s0.wp.com/latex.php?latex=a_%7B1%7D%28i%2Cd%29%3ER_%7B%5Ctau%7D+%5Cin+%5B10%2C50%5D%2C&bg=ffffff&fg=2b2b2b&s=0&c=20201002)



对于实际的混沌时间序列,从嵌入维数的最小值2开始,计算虚假最临近点的比例,然后逐渐增加维数
(2.3) 虚假最临近点法的改进-Cao方法:
虚假最临近点法对数据的噪声比较敏感,而且实际操作中需要选择阀值

假设我们有时间序列


这里的





定义









这里的



2. 相空间的预测
通过前面的相空间重构过程,一个混沌时间序列







这样我们就可以在


(1) 局部预测法:
假设






(1.1) 局部平均预测法:
考虑向量






也可以引入权重的概念来计算近似值:

其中



(1.2) 局部线性预测法:
假设

局部线性预测模型为

其中




取得最小值,其中




(1.3) 局部多项式预测法:
(2) 全局预测法:
(2.1) 神经网络
(2.2) 小波网络
(2.3) 遗传算法
3. 实验数据
这里使用Lorenz模型来作为测试数据,



其中


测试数据1:
使用1300个点,预测未来100个点,绿色曲线表示Lorenz模型在z坐标上的实际数据,红线右侧表示开始预测,蓝色曲线表示使用相空间重构模型所预测的数据。根据统计学分析可以得到:在红色线条的右侧,蓝色曲线的点和绿色曲线的点的Normalized Root Mean Square Error<8%, Mean Absolute Percentage Error<5.3%, 相关系数>97%.
把红线附近的图像放大可以看的更加清楚:
测试数据2:
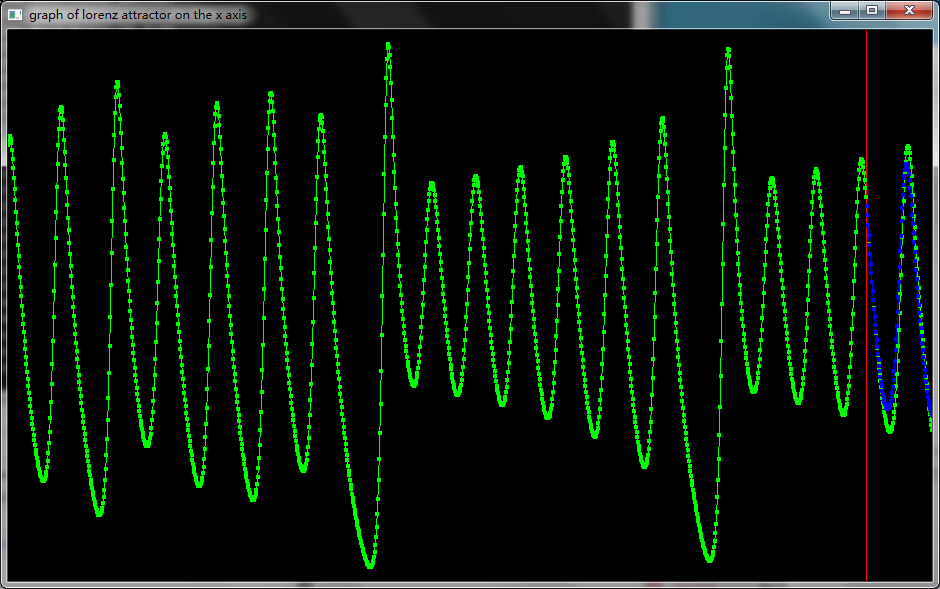
使用1800个点,预测未来100个点,绿色曲线表示Lorenz模型在x坐标上的实际数据,红线右侧表示开始预测,蓝色曲线表示使用相空间重构模型所预测的数据。根据统计学分析可以得到:在红色线条的右侧,蓝色曲线的点和绿色曲线的点的Normalized Root Mean Square Error<1%, Mean Absolute Percentage Error<2%, 相关系数>99%.

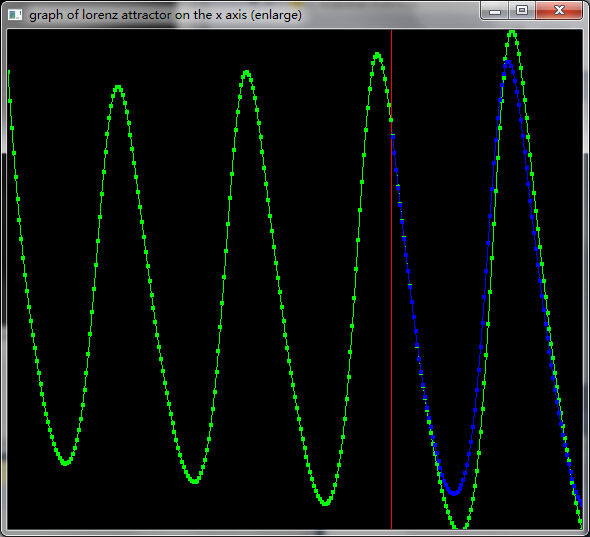
把红线附近的图像放大:
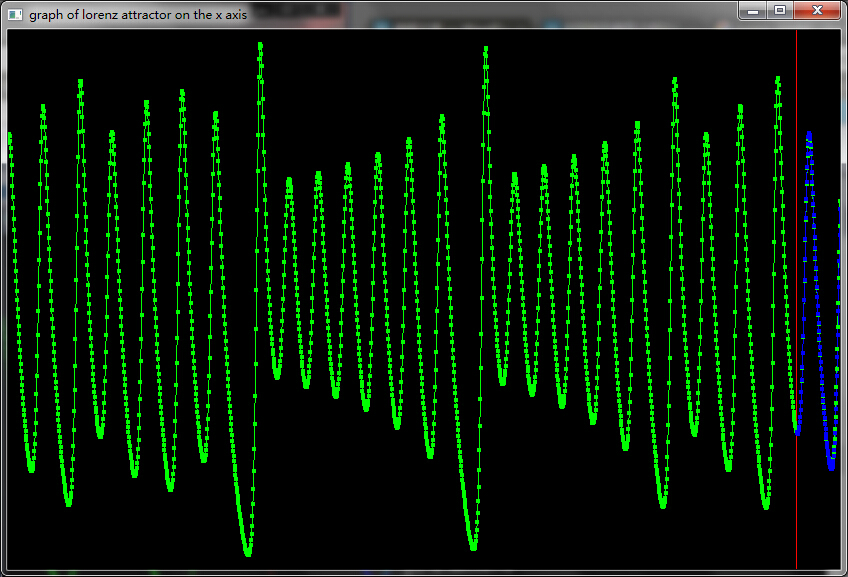
使用同样的数据量,也就是n=1800,预测未来100个点,绿色曲线表示Lorenz模型在z坐标上的实际数据,红线右侧表示开始预测,蓝色曲线表示使用相空间重构模型所预测的数据。根据统计学分析可以得到:在红色线条的右侧,蓝色曲线的点和绿色曲线的点的Normalized Root Mean Square Error<1%, Mean Absolute Percentage Error<1%, 相关系数>99%.
把红线附近的图像放大:

参考文献:
- https://en.wikipedia.org/wiki/Lorenz_system
- https://en.wikipedia.org/wiki/Root-mean-square_deviation
- https://en.wikipedia.org/wiki/Mean_absolute_percentage_error
- Practical method for determining the minimum embedding dimension of a scalar time series
- 基于混沌理论的往复式压缩机故障诊断
- determining embedding dimension for phase-space reconstruction using a geometric construction
- Time Series Prediction by Chaotic Modeling of Nonlinear Dynamical Systems
- nonlinear dynamics delay times and embedding windows
