Surface Integrals of Scalar Fields: Assume 


where the left hand side is the surface integral of the scalar field and the right hand side is the multiple integration. 




Remark. If 
the left hand side is

the right hand side is 




That means:

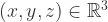
Surface Integrals of Vector Fields:
Imagine that we have a fluid flowing through 


This illustration implies that if the vector field is tangent to 

Assume 

The left hand side is the surface integral of vector field and the right hand side is the surface integral of scalar function, since 

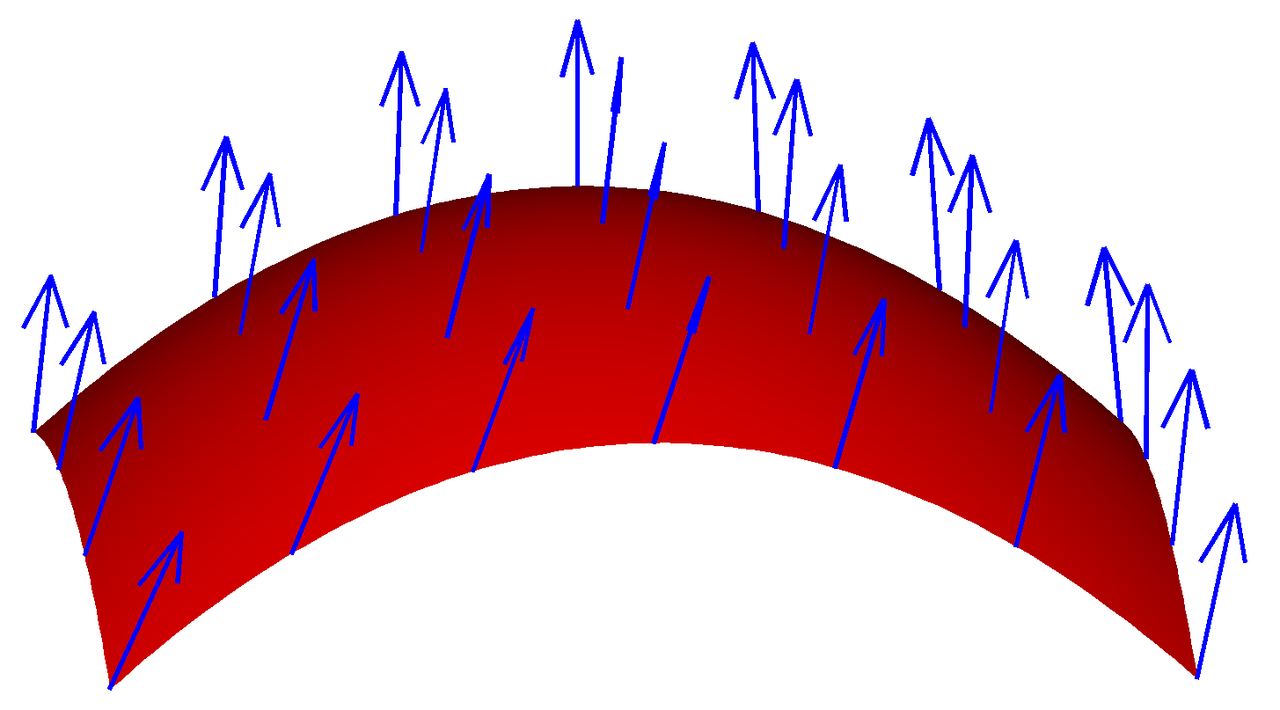
Divergence Theorem (Gauss’s theorem or Ostrogradsky’s theorem)
This theorem is a result that relates the flow (that is, flux) of a vector field through a surface to the behavior of the vector field inside the surface. More precisely, the divergence theorem states that the outward flux of a vector field through a closed surface is equal to the volume integral of the divergence over the region inside the surface. Intuitively, it states that the sum of all sources minus the sum of all sinks gives the net flow out of a region.

where 

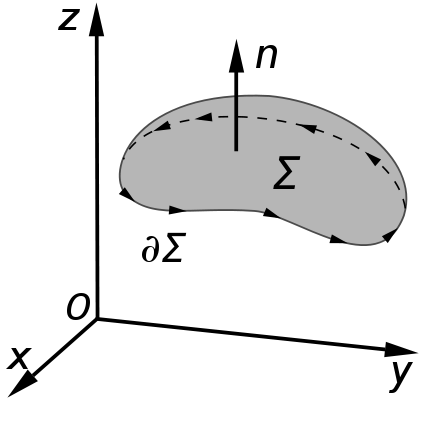
Stokes’ Theorem

where