
Reinforcement Learning, a key Google DeepMind algorithm, could overhaul news recommendation engines and greatly improve users stickiness. After beating a Go Grand Master, the algorithm could become the engine of choice for true personalization.
My interest for DeepMind goes back to its acquisition by Google, in January 2014, for about half a billion dollars. Later in California, I had conversations with Artificial Intelligence and deep learning experts; they said Google had in fact captured about half of the world’s best A.I. minds, snatching several years of Stanford A.I. classes, and paying top dollar for talent. Acquiring London startup Deep Mind was a key move in a strategy aimed at cornering the A.I. field. My interlocutors at Google and Stanford told me it could lead to major new iterations of the company, with A.I. percolating in every branch of Google (now Alphabet), from improving search to better YouTube recommendations, to more advanced projects such as predictive health care or automated transportation.
Demis Hassabis, DeepMind’s founder and CEO, a great communicator, gives captivating lectures, this Oxford University one among the best, delivered on February 24th. The 40-year old PhD in Cognitive Neuroscience, and Computer Science graduate from MIT and Harvard, offers this explanation of his work:
“The core of what we do focuses around what we call Reinforcement Learning. And that’s how we think about intelligence at DeepMind.
[Hassabis then shows the following diagram]
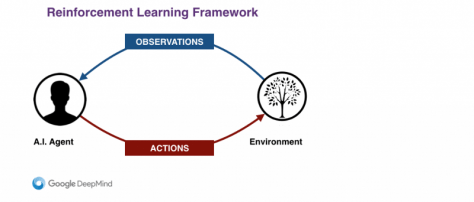
We start with the agent system, the A.I. That agent finds itself in some kind of environment, trying to achieve a goal. In a real-world environment, the agent could be a robot or, in a virtual environment, an avatar.
The agent interacts with the environment in two ways. Firstly against observations through its sensory operators. We currently use vision but we start to think about other modalities.
One of the jobs of the agent system is to build the best possible model of the environment out there, just based on these incomplete and noisy observations that [the agent] is receiving in real time. And it keeps updating its model in the face of new evidences.
Once it built this model, the second job of the agent is to make predictions of what is going to happen next. If you can make predictions, you can start planning about what to do. So if you try to achieve a goal, the agent will have a set of actions available. The decision making problem is to pick which action would be the best to take toward your goal.
Once the agent has decided that based on its model, and its planned trajectories, it executes actions that may or may not make some changes in the environment, and that drives the observations…”
Reinforcement Learning is a highly complex process. First, the observed environment is very noisy, incomplete and largely consists of unstructured pieces of data. When DeepMind decided to tackle basic Atari games like Breakout and Pong, the input was nothing but raw pixels, and the output was predictions — likely target position — and then actions — racket placement. All of the above aimed at maximizing the subsequent reward: survival and score. After a few hundreds games, the machine was able to devise on its own creative strategies that would surprise even its creators (read here, or view this video, time code 10:27).
Over time, the tests will migrate to more complex environment such as 3D games in which it becomes harder to distinguish the pattern of a wall from a useful piece of information.

A rather challenging signa-to-noise environment
DeepMind’s future goals involves dealing with very large and complex sets of data such as genomics, climate, energy or macroeconomics.
Regardless of the nature of the input stream, the principle is roughly the same. The A.I. system relies on a deep neural network to filter raw sensory data and form meaningful patterns to be analyzed. It then builds an optimized statistical model, updates it in real time, and derives the best possible actions from the set of observations available at a given moment. Then the whole system loops back.
How does this connect to improving news production?
Before we get into this, let’s roll back a little bit.
For a news production system, recommending related stories or videos is the most efficient way to increase reader engagement. For media who rely on advertising, sold on CPM or on a per-click basis, raising the number of page views per reader has a direct impact on ad revenue. Paid-for media are less sensitive to page views, but reminding readers of the breadth and depth of an editorial production is a key contributor to a news brand’s status — and a way to underline its economic value.
But there is a problem: today’s news recommendation systems are often terrible.
To display related stories or videos, publishers unwilling to invest in smart, fine-tuned systems have settled for engines based on crude semantic analysis of content. Hence embarrassing situations arise. For example, a piece about a major pedophile cover-up by the French clergy will trigger suggestions about child care. Or another where the state of an intellectual debate will suggest a piece on spelling, or an another one about waste management. The worst are stories automatically proposed by Outbrain or Taboola and picked up all over the web: not only are they the same everywhere, but they tap into the same endless field of click-bait items. The only virtue of these two systems is the direct cash-back for the publisher.
Something needs to be done to improve recommendation systems. A.I. and Reinforcement Learning offer a promising path.
In Demis Hassabis’ demonstration, the important words are : Environment, Observations, Models, Predictions and Actions. Let’s consider these keywords in the context of news production and consumption.
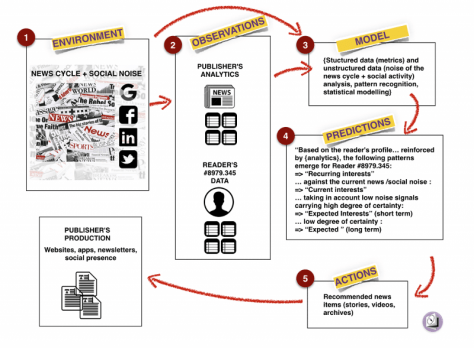
The Environment is dual. The external side is built on the general news cycle. At any given moment, automatically assessing a topic’s weight is reasonably easy, but even though they’re critical to predicting how the news cycle will evolve, detecting low-noise signals is much trickier. As for the internal news environment, it is simply the output of various contents produced (or curated) by the newsroom.
Observations are multiple: they include the vast range of available analytics, again at two levels: how a piece of contents is faring in general (against the background noise or the competition), and how each individual reader behaves. Here, things become interesting.
Models are then fed with a mix of statistical and behavioral data such as: “Stories [x] containing [semantic footprint] perform well against context [of this type of information].” Or: Reader #453.09809 is currently interested by [topics], but she has on her radar this [low-noise topic] that is small but growing.
Predictions detect both contents and topics that have the best lift in the news cycle and pique the reader’s interest, dynamically, in real time.
Actions will then range form putting stories or videos in front of the audience and, more specifically, at the individual level. Personalization will shift from passive (the system serves stories based of the presumed and generally static reader profile) to dynamic, based on current and predicted interest.
Demis Hassabis makes clear that enhanced personalization is on DeepMind’s roadmap:
“Personalization doesn’t work very well. It currently sums up to averaging the crowd as opposed to adapting to the human individual”
It would be unrealistic to see a news outlet developing such A.I.-based recommendation engine on its own, but we could easily foresee companies already working on A.I. selling it as SaaS (Software as a Service.)
A new generation of powerful recommendation engines could greatly benefit the news industry. It would ensure much higher reader loyalty, reinforce brand trust (it recommends stories that are both good and relevant), and help build deeper and more consistent news packages while giving a new life to archives.
Who will jump on the opportunity? Probably those who are the most prone to invest in tech. I would guess Buzzfeed and the Jeff Bezos-owned Washington Post.


 上式等价于
上式等价于



 ,意味着学习率是一个正数并且逐渐递减,对每一个维度都是一样的。而在 FTRL 算法里面,每个维度的学习率是不一样的。如果特征 A 比特征 B变化快,那么在维度 A 上面的学习率应该比维度 B 上面的学习率下降得更快。在 FTRL 中,维度 i 的学习率是这样定义的:
,意味着学习率是一个正数并且逐渐递减,对每一个维度都是一样的。而在 FTRL 算法里面,每个维度的学习率是不一样的。如果特征 A 比特征 B变化快,那么在维度 A 上面的学习率应该比维度 B 上面的学习率下降得更快。在 FTRL 中,维度 i 的学习率是这样定义的:
 , 所以
, 所以
 ,初始化
,初始化  (2)for
(2)for 
 for
for 

 // equals to
// equals to 



 end
end
end
end
 是 sigmoid 函数,
是 sigmoid 函数, ,需要预估
,需要预估  ,那么 LogLoss 函数是
,那么 LogLoss 函数是 ,
, ,所以 Logistic Regression 的 FTRL 算法就是:
,所以 Logistic Regression 的 FTRL 算法就是: // gradient of loss function
// gradient of loss function
 ,这里
,这里  是这个特征的均值,
是这个特征的均值, 是这个特征的方差。这里的归一化的关键之处在于数据的变化(Data Transforming)。对于处理一些大尺度数据(比方说某个视频被所有用户观看的次数之类的),一般会使用对数来处理数据,或者双曲线函数。例如:
是这个特征的方差。这里的归一化的关键之处在于数据的变化(Data Transforming)。对于处理一些大尺度数据(比方说某个视频被所有用户观看的次数之类的),一般会使用对数来处理数据,或者双曲线函数。例如:

![\rho_{XY}=cov(X,Y)/(\sigma_{X}\sigma_{Y})\in [-1,1]](https://s0.wp.com/latex.php?latex=%5Crho_%7BXY%7D%3Dcov%28X%2CY%29%2F%28%5Csigma_%7BX%7D%5Csigma_%7BY%7D%29%5Cin+%5B-1%2C1%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
 ,那么说明两个变量是线性反相关的;如果
,那么说明两个变量是线性反相关的;如果  ,那么说明两个变量是线性相关的。不过需要主要的是,即使
,那么说明两个变量是线性相关的。不过需要主要的是,即使  ,也只是说明两个变量是线性无关的,并不能推出它们之间是独立的。此时知道的就是一个线性分类器并不能把这个特征的正负样本分开,需要把该特征和其他特征交叉或者做其余的特征运算,形成一个或者多个新的特征,让这些新的特征发挥新的价值,做好进一步的分类工作。
,也只是说明两个变量是线性无关的,并不能推出它们之间是独立的。此时知道的就是一个线性分类器并不能把这个特征的正负样本分开,需要把该特征和其他特征交叉或者做其余的特征运算,形成一个或者多个新的特征,让这些新的特征发挥新的价值,做好进一步的分类工作。 subject to
subject to 

 时,这两种描述是等价的。
时,这两种描述是等价的。

 }
}
 }
}
 是一个标量,且
是一个标量,且  ,为 L1 正则化参数。
,为 L1 正则化参数。 是符号函数,如果
是符号函数,如果  是一个向量,那么
是一个向量,那么  。
。 是学习率,通常假设为
是学习率,通常假设为  的函数。
的函数。 代表了第 t 次迭代中损失函数的梯度,由于 OGD 每次仅根据观测到的一个样本进行权重更新,因此也不再使用区分样本的下标 j。
代表了第 t 次迭代中损失函数的梯度,由于 OGD 每次仅根据观测到的一个样本进行权重更新,因此也不再使用区分样本的下标 j。 是分段函数,
是分段函数,


 并且
并且  。如果
。如果  。
。
 定义为:
定义为:![T_{1}(v_{i},\alpha,\theta)=\max(0,v_{i}-\alpha) \text{ if } v_{i}\in [0,\theta]](https://s0.wp.com/latex.php?latex=T_%7B1%7D%28v_%7Bi%7D%2C%5Calpha%2C%5Ctheta%29%3D%5Cmax%280%2Cv_%7Bi%7D-%5Calpha%29+%5Ctext%7B+if+%7D+v_%7Bi%7D%5Cin+%5B0%2C%5Ctheta%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)


 ,并且
,并且  。Truncated Gradient 方法同样是以 k 作为窗口,每进行 k 步就进行一次截断操作。当 t/k 不是整数时,
。Truncated Gradient 方法同样是以 k 作为窗口,每进行 k 步就进行一次截断操作。当 t/k 不是整数时, ,当 t/k 是整数时,
,当 t/k 是整数时, 。从上面的公式可以看出,
。从上面的公式可以看出, 决定了 W 的稀疏程度,如果
决定了 W 的稀疏程度,如果  都很大,那么稀疏性就会越强。特别的,当
都很大,那么稀疏性就会越强。特别的,当  时,此时只需要控制一个参数就可以控制稀疏性。
时,此时只需要控制一个参数就可以控制稀疏性。 for t = 1,2,3,... 计算
for t = 1,2,3,... 计算  for all
for all  .
(ii)当 t/k 是整数时,采取截断技术。
.
(ii)当 t/k 是整数时,采取截断技术。
 , if
, if ![(w_{i}-\eta^{(t)}g_{i})\in[0,\theta]](https://s0.wp.com/latex.php?latex=%28w_%7Bi%7D-%5Ceta%5E%7B%28t%29%7Dg_%7Bi%7D%29%5Cin%5B0%2C%5Ctheta%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
 , else if
, else if ![(w_{i}-\eta^{(t)}g_{i})\in[-\theta,0]](https://s0.wp.com/latex.php?latex=%28w_%7Bi%7D-%5Ceta%5E%7B%28t%29%7Dg_%7Bi%7D%29%5Cin%5B-%5Ctheta%2C0%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
 , otherwise
return W.
, otherwise
return W. 和
和 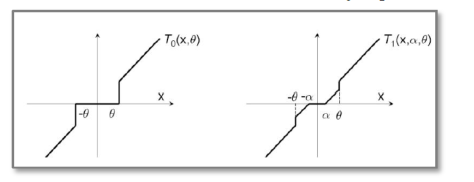
 ,截断梯度法就可以变成简单截断法。从公式上也可以通过计算直接得出。
,截断梯度法就可以变成简单截断法。从公式上也可以通过计算直接得出。


 ,如果
,如果  存在一个最优解,那么可以推断 0 向量一定属于
存在一个最优解,那么可以推断 0 向量一定属于  的次梯度集合:
的次梯度集合: .
. , 那么可以得到权重更新的另外一种形式:
, 那么可以得到权重更新的另外一种形式:
 有关,还和自己
有关,还和自己  有关。这也许就是”前向后向切分”这个名称的由来。
有关。这也许就是”前向后向切分”这个名称的由来。 是 L1 范数,中间向量是
是 L1 范数,中间向量是  , 并且参数
, 并且参数  ,那么公式就可以展开得到
,那么公式就可以展开得到
 for all $latex 1\leq i \leq N$.
for all $latex 1\leq i \leq N$. 是
是  的最优解,那么
的最优解,那么  .
. ,那么
,那么  , 这与条件矛盾。
, 这与条件矛盾。
 for all
for all 
 是梯度
是梯度  在第 i 个维度的分量。
在第 i 个维度的分量。 , 则有
, 则有  意思就是如果这次训练产生梯度的变化不足以令权重值发生足够大的变化时,就认为在这次训练中该维度不够重要,应该强制其权重是0.
意思就是如果这次训练产生梯度的变化不足以令权重值发生足够大的变化时,就认为在这次训练中该维度不够重要,应该强制其权重是0. ,那么则有
,那么则有
 , 计算
, 计算  ,
, for all
for all  (3)Return W
(3)Return W ,可以得到 L1-FOBOS 与 Truncated Gradient 完全一致,换句话说 L1-FOBOS 是 Truncated Gradient 在一些特定条件下的形式。
,可以得到 L1-FOBOS 与 Truncated Gradient 完全一致,换句话说 L1-FOBOS 是 Truncated Gradient 在一些特定条件下的形式。
 指的是向量
指的是向量  是一个严格凸函数,
是一个严格凸函数, 是一个非负递增序列。
是一个非负递增序列。 包括了之前所有梯度的平均值。
包括了之前所有梯度的平均值。 。
。 ;
; ,i.e.
,i.e.  是一个非负递增序列。那么 RDA 算法就可以写成:
是一个非负递增序列。那么 RDA 算法就可以写成:



 if
if 
 otherwise
otherwise 小于
小于  ,初始化
,初始化  (2)for
(2)for  更新
更新  ,可以得到:
,可以得到:


 。如果令
。如果令 

 上面的公式可以写成:
上面的公式可以写成:

 与其余三个物品1,2,3的相似度分别是
与其余三个物品1,2,3的相似度分别是 物品1,2,3的点击率(click through rate)分别是
物品1,2,3的点击率(click through rate)分别是 此刻如果物品3的点击率过低,那么需要把第3个物品与物品
此刻如果物品3的点击率过低,那么需要把第3个物品与物品 从而使得第4个物品能够取代第3个物品。
从而使得第4个物品能够取代第3个物品。
 是待定的系数。下面就来研究新的相似度满足的性质。
是待定的系数。下面就来研究新的相似度满足的性质。 对任何的实数
对任何的实数 i.e. 第1个物品的点击率最高,那么
i.e. 第1个物品的点击率最高,那么 对于任何
对于任何 对于
对于 是非增函数,i.e. 导数
是非增函数,i.e. 导数
 换句话说,随着
换句话说,随着
 那么
那么 对于任何
对于任何 对于
对于
 换句话说,随着
换句话说,随着
 那么
那么 通过选择合适的
通过选择合适的 可以使得
可以使得 在这里的
在这里的 指的是物品
指的是物品
 如果
如果 ,那么表示用户i购买了物品j;如果
,那么表示用户i购买了物品j;如果 , 那么表示用户i没有购买物品j。用
, 那么表示用户i没有购买物品j。用 来表示物品1到物品n的能量。用
来表示物品1到物品n的能量。用 表示用户
表示用户 的度,也就是该用户购买的物品数量。用
的度,也就是该用户购买的物品数量。用 表示物品j的度,也就是该物品被多少个用户购买过。根据物质扩散的算法描述,第一步需要计算出用户从物品那里得到的能量,此时用户
表示物品j的度,也就是该物品被多少个用户购买过。根据物质扩散的算法描述,第一步需要计算出用户从物品那里得到的能量,此时用户 得到的能量用
得到的能量用 表示,那么
表示,那么
 的新能量用
的新能量用 表示,那么
表示,那么
 我们有
我们有


 矩阵
矩阵 列向量
列向量 和
和 ,那么
,那么
 每列的和都是1,i.e.
每列的和都是1,i.e.  对于所有的
对于所有的 都成立。
都成立。
 对于所有的
对于所有的 都成立。换言之,矩阵
都成立。换言之,矩阵 和
和 的定义可以得到结论。
的定义可以得到结论。 对于所有的
对于所有的 可以得到
可以得到

 可以直接计算得到:
可以直接计算得到:
 的用户都是物品
的用户都是物品 的用户,换句话说,如果
的用户,换句话说,如果 则有
则有 那么
那么 对于所有的
对于所有的 那么物品
那么物品

 那么上面两个式子相等。i.e.
那么上面两个式子相等。i.e. 
 可以看成物品
可以看成物品 那么说明物品
那么说明物品 那么说明物品
那么说明物品 越小,那么物品
越小,那么物品 对于所有的
对于所有的 都是成立的。
都是成立的。 对于
对于 所以上面性质成立。
所以上面性质成立。 的相似度是
的相似度是

 并没有选择物品
并没有选择物品 那么预测分数则是
那么预测分数则是
 是否购买了物品
是否购买了物品 然后对于任意的用户和物品组成的对
然后对于任意的用户和物品组成的对 只要
只要 从大到小对
从大到小对 如下:
如下:
 对计算用户相似度的时候有抑制作用。此时的评分系统则是:如果用户
对计算用户相似度的时候有抑制作用。此时的评分系统则是:如果用户 之前没有购买物品
之前没有购买物品 那么其预测分数则是
那么其预测分数则是
 定义用户
定义用户 的相似度
的相似度 如下:
如下:
 时,减弱了热门物品对用户相似度的影响;当
时,减弱了热门物品对用户相似度的影响;当 时,增加了热门物品对用户相似度的影响。某篇论文显示基于某些数据,
时,增加了热门物品对用户相似度的影响。某篇论文显示基于某些数据, 是最佳的参数。
是最佳的参数。