Introduction
Time series provide the opportunity to forecast future values. Based on previous values, time series can be used to forecast trends in economics, weather, and capacity planning, to name a few. The specific properties of time-series data mean that specialized statistical methods are usually required.
In this tutorial, we will aim to produce reliable forecasts of time series. We will begin by introducing and discussing the concepts of autocorrelation, stationarity, and seasonality, and proceed to apply one of the most commonly used method for time-series forecasting, known as ARIMA.
One of the methods available in Python to model and predict future points of a time series is known as SARIMAX, which stands for Seasonal AutoRegressive Integrated Moving Averages with eXogenous regressors. Here, we will primarily focus on the ARIMA component, which is used to fit time-series data to better understand and forecast future points in the time series.
Prerequisites
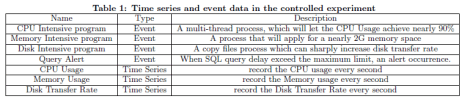
This guide will cover how to do time-series analysis on either a local desktop or a remote server. Working with large datasets can be memory intensive, so in either case, the computer will need at least 2GB of memory to perform some of the calculations in this guide.
To make the most of this tutorial, some familiarity with time series and statistics can be helpful.
For this tutorial, we’ll be using Jupyter Notebook to work with the data. If you do not have it already, you should follow our tutorial to install and set up Jupyter Notebook for Python 3.
Step 1 — Installing Packages
To set up our environment for time-series forecasting, let’s first move into our local programming environment or server-based programming environment:
From here, let’s create a new directory for our project. We will call it ARIMA and then move into the directory. If you call the project a different name, be sure to substitute your name for ARIMA throughout the guide
This tutorial will require the warnings, itertools, pandas, numpy, matplotlib and statsmodels libraries. The warnings and itertools libraries come included with the standard Python library set so you shouldn’t need to install them.
Like with other Python packages, we can install these requirements with pip.
We can now install pandas, statsmodels, and the data plotting package matplotlib. Their dependencies will also be installed:
- pip install pandas numpy statsmodels matplotlib
At this point, we’re now set up to start working with the installed packages.
Step 2 — Importing Packages and Loading Data
To begin working with our data, we will start up Jupyter Notebook:
To create a new notebook file, select New > Python 3 from the top right pull-down menu:
This will open a notebook.
As is best practice, start by importing the libraries you will need at the top of your notebook:
import warnings
import itertools
import pandas as pd
import numpy as np
import statsmodels.api as sm
import matplotlib.pyplot as plt
plt.style.use('fivethirtyeight')
We have also defined a matplotlib style of fivethirtyeight for our plots.
We’ll be working with a dataset called “Atmospheric CO2 from Continuous Air Samples at Mauna Loa Observatory, Hawaii, U.S.A.,” which collected CO2 samples from March 1958 to December 2001. We can bring in this data as follows:
data = sm.datasets.co2.load_pandas()
y = data.data
Let’s preprocess our data a little bit before moving forward. Weekly data can be tricky to work with since it’s a briefer amount of time, so let’s use monthly averages instead. We’ll make the conversion with the resample function. For simplicity, we can also use the fillna() function to ensure that we have no missing values in our time series.
y = y['co2'].resample('MS').mean()
y = y.fillna(y.bfill())
print(y)
Output
co2
1958-03-01 316.100000
1958-04-01 317.200000
1958-05-01 317.433333
...
2001-11-01 369.375000
2001-12-01 371.020000
Let’s explore this time series e as a data visualization:
y.plot(figsize=(15, 6))
plt.show()
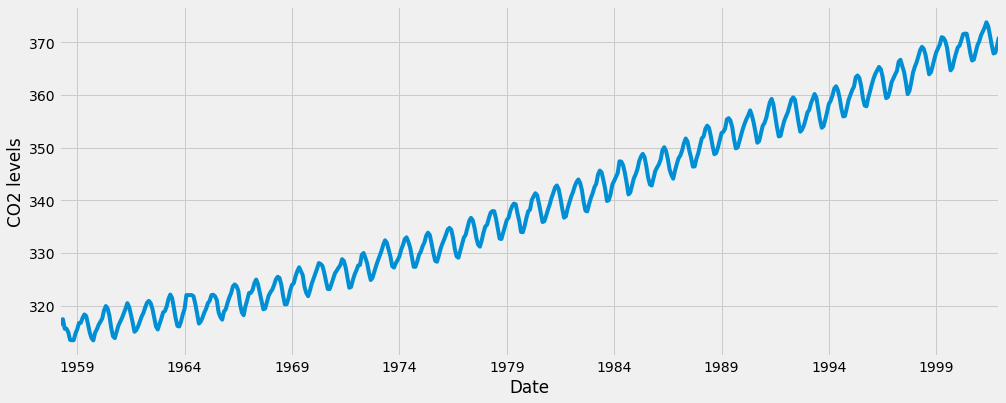
Some distinguishable patterns appear when we plot the data. The time series has an obvious seasonality pattern, as well as an overall increasing trend.
To learn more about time series pre-processing, please refer to “A Guide to Time Series Visualization with Python 3,” where the steps above are described in much more detail.
Now that we’ve converted and explored our data, let’s move on to time series forecasting with ARIMA.
Step 3 — The ARIMA Time Series Model
One of the most common methods used in time series forecasting is known as the ARIMA model, which stands for AutoregRessive Integrated Moving Average. ARIMA is a model that can be fitted to time series data in order to better understand or predict future points in the series.
There are three distinct integers (p, d, q) that are used to parametrize ARIMA models. Because of that, ARIMA models are denoted with the notation ARIMA(p, d, q). Together these three parameters account for seasonality, trend, and noise in datasets:
p is the auto-regressive part of the model. It allows us to incorporate the effect of past values into our model. Intuitively, this would be similar to stating that it is likely to be warm tomorrow if it has been warm the past 3 days.d is the integrated part of the model. This includes terms in the model that incorporate the amount of differencing (i.e. the number of past time points to subtract from the current value) to apply to the time series. Intuitively, this would be similar to stating that it is likely to be same temperature tomorrow if the difference in temperature in the last three days has been very small.q is the moving average part of the model. This allows us to set the error of our model as a linear combination of the error values observed at previous time points in the past.
When dealing with seasonal effects, we make use of the seasonal ARIMA, which is denoted as ARIMA(p,d,q)(P,D,Q)s. Here, (p, d, q) are the non-seasonal parameters described above, while (P, D, Q) follow the same definition but are applied to the seasonal component of the time series. The term s is the periodicity of the time series (4 for quarterly periods, 12 for yearly periods, etc.).
The seasonal ARIMA method can appear daunting because of the multiple tuning parameters involved. In the next section, we will describe how to automate the process of identifying the optimal set of parameters for the seasonal ARIMA time series model.
Step 4 — Parameter Selection for the ARIMA Time Series Model
When looking to fit time series data with a seasonal ARIMA model, our first goal is to find the values of ARIMA(p,d,q)(P,D,Q)s that optimize a metric of interest. There are many guidelines and best practices to achieve this goal, yet the correct parametrization of ARIMA models can be a painstaking manual process that requires domain expertise and time. Other statistical programming languages such as R provide automated ways to solve this issue, but those have yet to be ported over to Python. In this section, we will resolve this issue by writing Python code to programmatically select the optimal parameter values for our ARIMA(p,d,q)(P,D,Q)s time series model.
We will use a “grid search” to iteratively explore different combinations of parameters. For each combination of parameters, we fit a new seasonal ARIMA model with the SARIMAX() function from the statsmodels module and assess its overall quality. Once we have explored the entire landscape of parameters, our optimal set of parameters will be the one that yields the best performance for our criteria of interest. Let’s begin by generating the various combination of parameters that we wish to assess:
p = d = q = range(0, 2)
pdq = list(itertools.product(p, d, q))
seasonal_pdq = [(x[0], x[1], x[2], 12) for x in list(itertools.product(p, d, q))]
print('Examples of parameter combinations for Seasonal ARIMA...')
print('SARIMAX: {} x {}'.format(pdq[1], seasonal_pdq[1]))
print('SARIMAX: {} x {}'.format(pdq[1], seasonal_pdq[2]))
print('SARIMAX: {} x {}'.format(pdq[2], seasonal_pdq[3]))
print('SARIMAX: {} x {}'.format(pdq[2], seasonal_pdq[4]))
Output
Examples of parameter combinations for Seasonal ARIMA...
SARIMAX: (0, 0, 1) x (0, 0, 1, 12)
SARIMAX: (0, 0, 1) x (0, 1, 0, 12)
SARIMAX: (0, 1, 0) x (0, 1, 1, 12)
SARIMAX: (0, 1, 0) x (1, 0, 0, 12)
We can now use the triplets of parameters defined above to automate the process of training and evaluating ARIMA models on different combinations. In Statistics and Machine Learning, this process is known as grid search (or hyperparameter optimization) for model selection.
When evaluating and comparing statistical models fitted with different parameters, each can be ranked against one another based on how well it fits the data or its ability to accurately predict future data points. We will use the AIC (Akaike Information Criterion) value, which is conveniently returned with ARIMA models fitted using statsmodels. The AIC measures how well a model fits the data while taking into account the overall complexity of the model. A model that fits the data very well while using lots of features will be assigned a larger AIC score than a model that uses fewer features to achieve the same goodness-of-fit. Therefore, we are interested in finding the model that yields the lowest AIC value.
The code chunk below iterates through combinations of parameters and uses the SARIMAX function from statsmodels to fit the corresponding Seasonal ARIMA model. Here, the order argument specifies the (p, d, q) parameters, while the seasonal_order argument specifies the (P, D, Q, S) seasonal component of the Seasonal ARIMA model. After fitting each SARIMAX()model, the code prints out its respective AICscore.
warnings.filterwarnings("ignore")
for param in pdq:
for param_seasonal in seasonal_pdq:
try:
mod = sm.tsa.statespace.SARIMAX(y,
order=param,
seasonal_order=param_seasonal,
enforce_stationarity=False,
enforce_invertibility=False)
results = mod.fit()
print('ARIMA{}x{}12 - AIC:{}'.format(param, param_seasonal, results.aic))
except:
continue
Because some parameter combinations may lead to numerical misspecifications, we explicitly disabled warning messages in order to avoid an overload of warning messages. These misspecifications can also lead to errors and throw an exception, so we make sure to catch these exceptions and ignore the parameter combinations that cause these issues.
The code above should yield the following results, this may take some time:
Output
SARIMAX(0, 0, 0)x(0, 0, 1, 12) - AIC:6787.3436240402125
SARIMAX(0, 0, 0)x(0, 1, 1, 12) - AIC:1596.711172764114
SARIMAX(0, 0, 0)x(1, 0, 0, 12) - AIC:1058.9388921320026
SARIMAX(0, 0, 0)x(1, 0, 1, 12) - AIC:1056.2878315690562
SARIMAX(0, 0, 0)x(1, 1, 0, 12) - AIC:1361.6578978064144
SARIMAX(0, 0, 0)x(1, 1, 1, 12) - AIC:1044.7647912940095
...
...
...
SARIMAX(1, 1, 1)x(1, 0, 0, 12) - AIC:576.8647112294245
SARIMAX(1, 1, 1)x(1, 0, 1, 12) - AIC:327.9049123596742
SARIMAX(1, 1, 1)x(1, 1, 0, 12) - AIC:444.12436865161305
SARIMAX(1, 1, 1)x(1, 1, 1, 12) - AIC:277.7801413828764
The output of our code suggests that SARIMAX(1, 1, 1)x(1, 1, 1, 12) yields the lowest AIC value of 277.78. We should therefore consider this to be optimal option out of all the models we have considered.
Step 5 — Fitting an ARIMA Time Series Model
Using grid search, we have identified the set of parameters that produces the best fitting model to our time series data. We can proceed to analyze this particular model in more depth.
We’ll start by plugging the optimal parameter values into a new SARIMAX model:
mod = sm.tsa.statespace.SARIMAX(y,
order=(1, 1, 1),
seasonal_order=(1, 1, 1, 12),
enforce_stationarity=False,
enforce_invertibility=False)
results = mod.fit()
print(results.summary().tables[1])
Output
==============================================================================
coef std err z P>|z| [0.025 0.975]
------------------------------------------------------------------------------
ar.L1 0.3182 0.092 3.443 0.001 0.137 0.499
ma.L1 -0.6255 0.077 -8.165 0.000 -0.776 -0.475
ar.S.L12 0.0010 0.001 1.732 0.083 -0.000 0.002
ma.S.L12 -0.8769 0.026 -33.811 0.000 -0.928 -0.826
sigma2 0.0972 0.004 22.634 0.000 0.089 0.106
==============================================================================
The summary attribute that results from the output of SARIMAX returns a significant amount of information, but we’ll focus our attention on the table of coefficients. The coef column shows the weight (i.e. importance) of each feature and how each one impacts the time series. The P>|z| column informs us of the significance of each feature weight. Here, each weight has a p-value lower or close to 0.05, so it is reasonable to retain all of them in our model.
When fitting seasonal ARIMA models (and any other models for that matter), it is important to run model diagnostics to ensure that none of the assumptions made by the model have been violated. The plot_diagnostics object allows us to quickly generate model diagnostics and investigate for any unusual behavior.
results.plot_diagnostics(figsize=(15, 12))
plt.show()
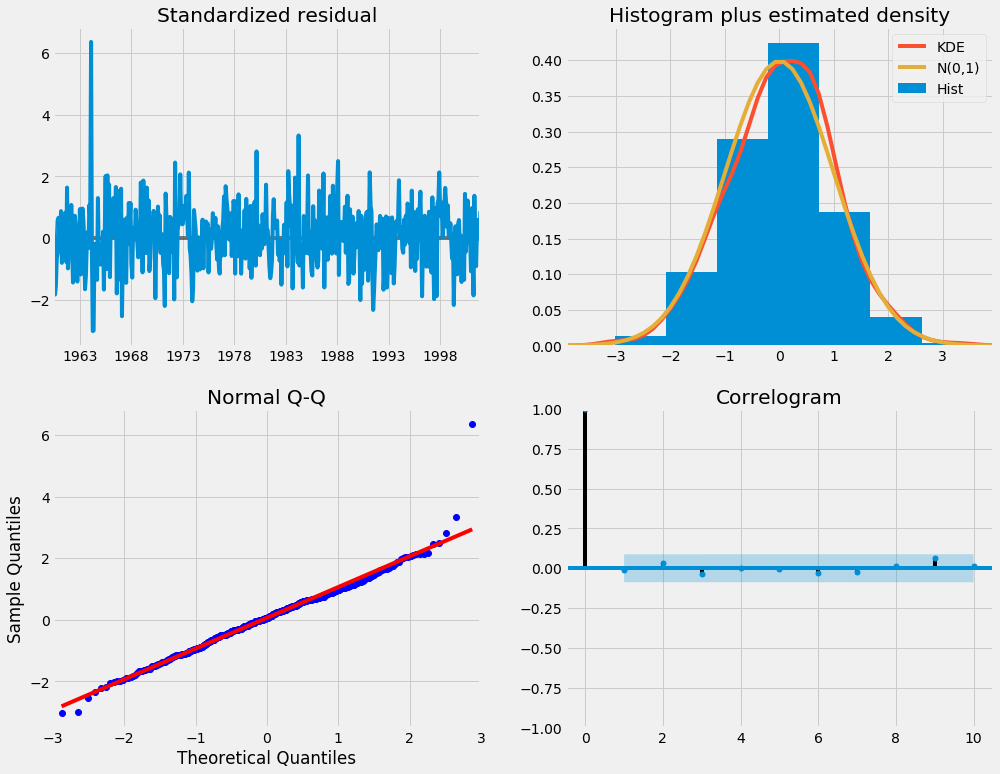
Our primary concern is to ensure that the residuals of our model are uncorrelated and normally distributed with zero-mean. If the seasonal ARIMA model does not satisfy these properties, it is a good indication that it can be further improved.
In this case, our model diagnostics suggests that the model residuals are normally distributed based on the following:
- In the top right plot, we see that the red
KDE line follows closely with the N(0,1) line (where N(0,1)) is the standard notation for a normal distribution with mean 0 and standard deviation of 1). This is a good indication that the residuals are normally distributed.
- The qq-plot on the bottom left shows that the ordered distribution of residuals (blue dots) follows the linear trend of the samples taken from a standard normal distribution with
N(0, 1). Again, this is a strong indication that the residuals are normally distributed.
- The residuals over time (top left plot) don’t display any obvious seasonality and appear to be white noise. This is confirmed by the autocorrelation (i.e. correlogram) plot on the bottom right, which shows that the time series residuals have low correlation with lagged versions of itself.
Those observations lead us to conclude that our model produces a satisfactory fit that could help us understand our time series data and forecast future values.
Although we have a satisfactory fit, some parameters of our seasonal ARIMA model could be changed to improve our model fit. For example, our grid search only considered a restricted set of parameter combinations, so we may find better models if we widened the grid search.
Step 6 — Validating Forecasts
We have obtained a model for our time series that can now be used to produce forecasts. We start by comparing predicted values to real values of the time series, which will help us understand the accuracy of our forecasts. The get_prediction() and conf_int() attributes allow us to obtain the values and associated confidence intervals for forecasts of the time series.
pred = results.get_prediction(start=pd.to_datetime('1998-01-01'), dynamic=False)
pred_ci = pred.conf_int()
The code above requires the forecasts to start at January 1998.
The dynamic=False argument ensures that we produce one-step ahead forecasts, meaning that forecasts at each point are generated using the full history up to that point.
We can plot the real and forecasted values of the CO2 time series to assess how well we did. Notice how we zoomed in on the end of the time series by slicing the date index.
ax = y['1990':].plot(label='observed')
pred.predicted_mean.plot(ax=ax, label='One-step ahead Forecast', alpha=.7)
ax.fill_between(pred_ci.index,
pred_ci.iloc[:, 0],
pred_ci.iloc[:, 1], color='k', alpha=.2)
ax.set_xlabel('Date')
ax.set_ylabel('CO2 Levels')
plt.legend()
plt.show()
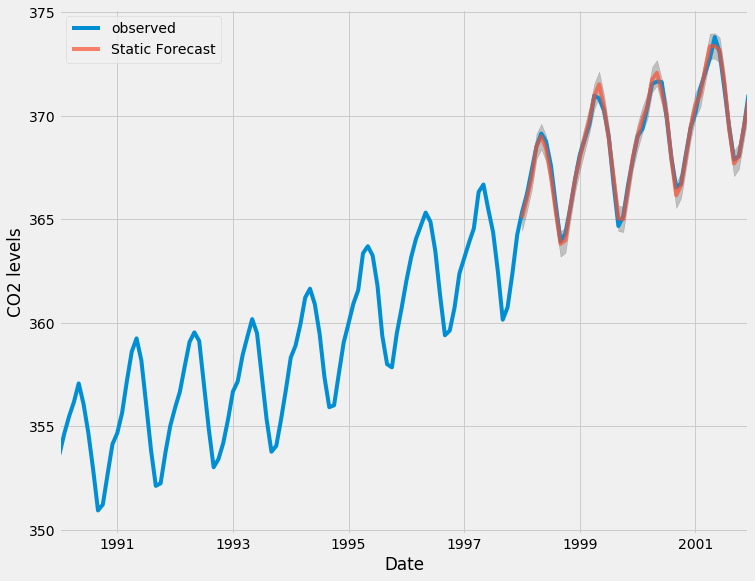
Overall, our forecasts align with the true values very well, showing an overall increase trend.
It is also useful to quantify the accuracy of our forecasts. We will use the MSE (Mean Squared Error), which summarizes the average error of our forecasts. For each predicted value, we compute its distance to the true value and square the result. The results need to be squared so that positive/negative differences do not cancel each other out when we compute the overall mean.
y_forecasted = pred.predicted_mean
y_truth = y['1998-01-01':]
mse = ((y_forecasted - y_truth) ** 2).mean()
print('The Mean Squared Error of our forecasts is {}'.format(round(mse, 2)))
Output
The Mean Squared Error of our forecasts is 0.07
The MSE of our one-step ahead forecasts yields a value of 0.07, which is very low as it is close to 0. An MSE of 0 would that the estimator is predicting observations of the parameter with perfect accuracy, which would be an ideal scenario but it not typically possible.
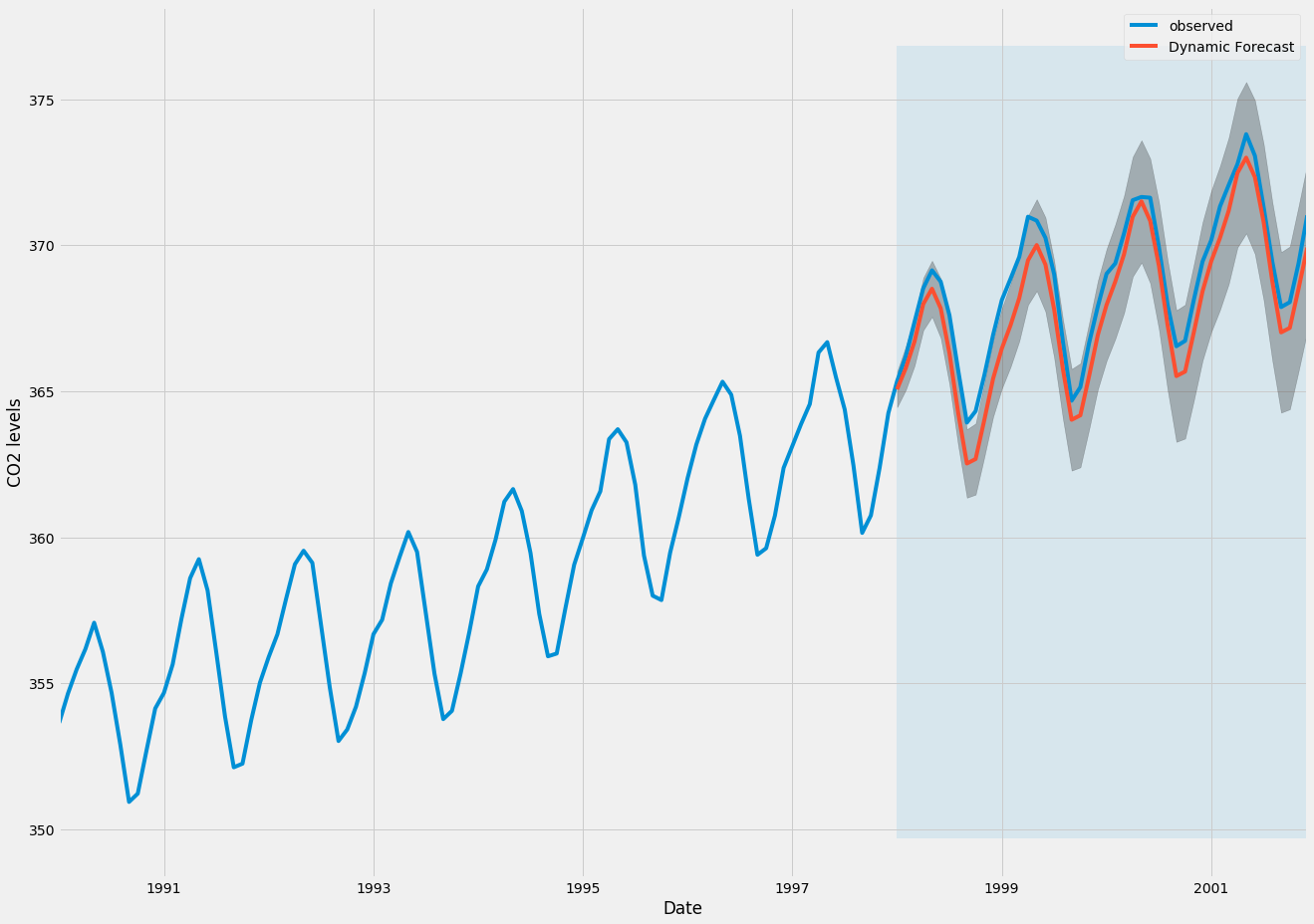
However, a better representation of our true predictive power can be obtained using dynamic forecasts. In this case, we only use information from the time series up to a certain point, and after that, forecasts are generated using values from previous forecasted time points.
In the code chunk below, we specify to start computing the dynamic forecasts and confidence intervals from January 1998 onwards.
pred_dynamic = results.get_prediction(start=pd.to_datetime('1998-01-01'), dynamic=True, full_results=True)
pred_dynamic_ci = pred_dynamic.conf_int()
Plotting the observed and forecasted values of the time series, we see that the overall forecasts are accurate even when using dynamic forecasts. All forecasted values (red line) match pretty closely to the ground truth (blue line), and are well within the confidence intervals of our forecast.
ax = y['1990':].plot(label='observed', figsize=(20, 15))
pred_dynamic.predicted_mean.plot(label='Dynamic Forecast', ax=ax)
ax.fill_between(pred_dynamic_ci.index,
pred_dynamic_ci.iloc[:, 0],
pred_dynamic_ci.iloc[:, 1], color='k', alpha=.25)
ax.fill_betweenx(ax.get_ylim(), pd.to_datetime('1998-01-01'), y.index[-1],
alpha=.1, zorder=-1)
ax.set_xlabel('Date')
ax.set_ylabel('CO2 Levels')
plt.legend()
plt.show()
Once again, we quantify the predictive performance of our forecasts by computing the MSE:
y_forecasted = pred_dynamic.predicted_mean
y_truth = y['1998-01-01':]
mse = ((y_forecasted - y_truth) ** 2).mean()
print('The Mean Squared Error of our forecasts is {}'.format(round(mse, 2)))
Output
The Mean Squared Error of our forecasts is 1.01
The predicted values obtained from the dynamic forecasts yield an MSE of 1.01. This is slightly higher than the one-step ahead, which is to be expected given that we are relying on less historical data from the time series.
Both the one-step ahead and dynamic forecasts confirm that this time series model is valid. However, much of the interest around time series forecasting is the ability to forecast future values way ahead in time.
Step 7 — Producing and Visualizing Forecasts
In the final step of this tutorial, we describe how to leverage our seasonal ARIMA time series model to forecast future values. The get_forecast() attribute of our time series object can compute forecasted values for a specified number of steps ahead.
pred_uc = results.get_forecast(steps=500)
pred_ci = pred_uc.conf_int()
We can use the output of this code to plot the time series and forecasts of its future values.
ax = y.plot(label='observed', figsize=(20, 15))
pred_uc.predicted_mean.plot(ax=ax, label='Forecast')
ax.fill_between(pred_ci.index,
pred_ci.iloc[:, 0],
pred_ci.iloc[:, 1], color='k', alpha=.25)
ax.set_xlabel('Date')
ax.set_ylabel('CO2 Levels')
plt.legend()
plt.show()
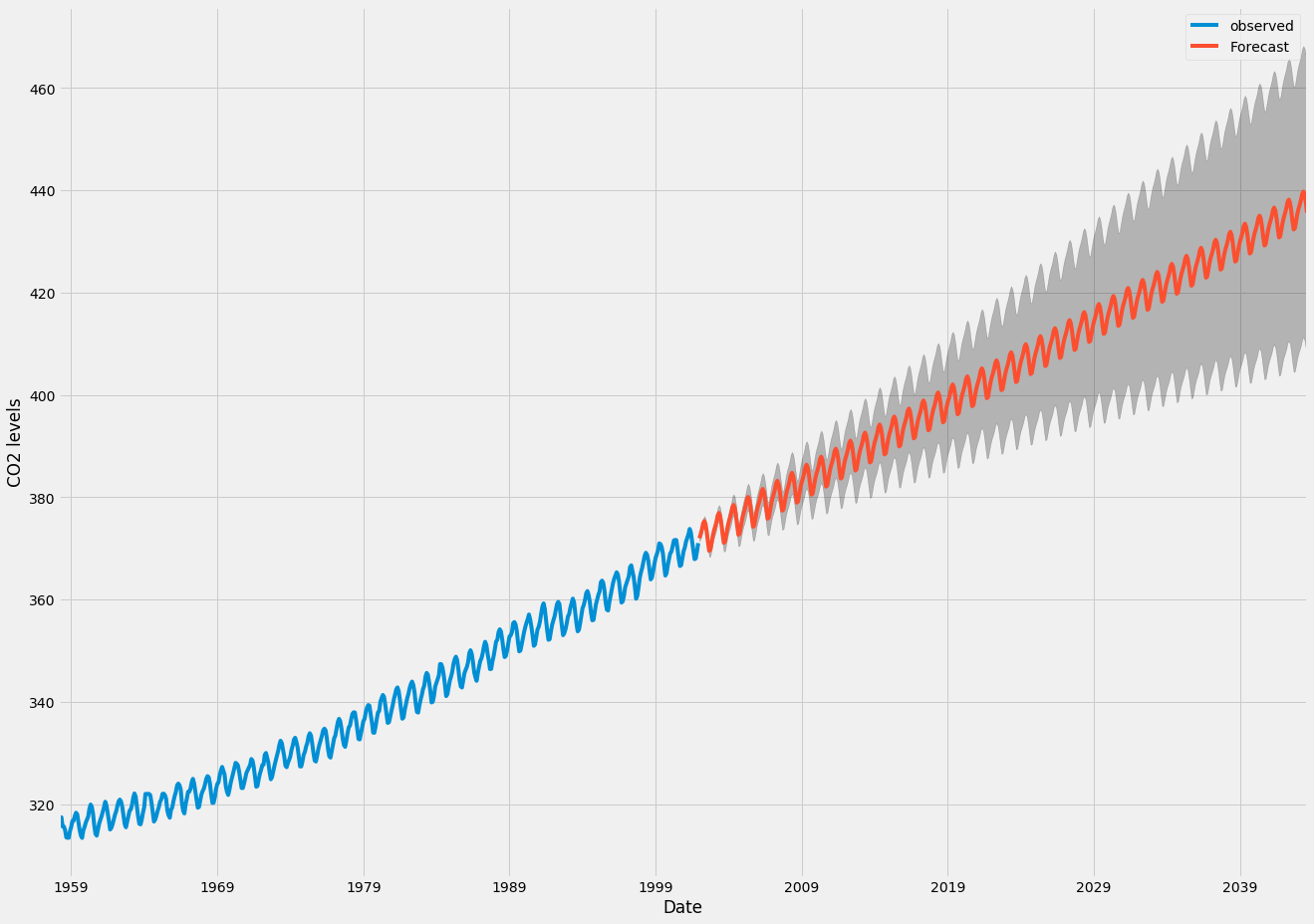
Both the forecasts and associated confidence interval that we have generated can now be used to further understand the time series and foresee what to expect. Our forecasts show that the time series is expected to continue increasing at a steady pace.
As we forecast further out into the future, it is natural for us to become less confident in our values. This is reflected by the confidence intervals generated by our model, which grow larger as we move further out into the future.
Conclusion
In this tutorial, we described how to implement a seasonal ARIMA model in Python. We made extensive use of the pandas and statsmodels libraries and showed how to run model diagnostics, as well as how to produce forecasts of the CO2 time series.
Here are a few other things you could try:
- Change the start date of your dynamic forecasts to see how this affects the overall quality of your forecasts.
- Try more combinations of parameters to see if you can improve the goodness-of-fit of your model.
- Select a different metric to select the best model. For example, we used the
AIC measure to find the best model, but you could seek to optimize the out-of-sample mean square error instead.
For more practice, you could also try to load another time series dataset to produce your own forecasts.





















时,则
表示最后的距离;
时,则
时,则
表示最后的距离。


![q[i]](https://s0.wp.com/latex.php?latex=q%5Bi%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
![c[j]](https://s0.wp.com/latex.php?latex=c%5Bj%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002)




















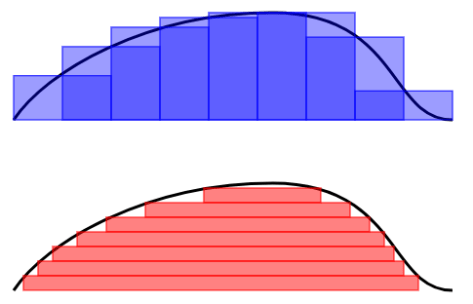
 在 [0,1] 区间上与 X 坐标轴所夹的图形面积,就使用了 Riemann 积分的思想。 他把 [0,1] 区间等长地切割成 n 段,每一段使用一个长方形去逼近
在 [0,1] 区间上与 X 坐标轴所夹的图形面积,就使用了 Riemann 积分的思想。 他把 [0,1] 区间等长地切割成 n 段,每一段使用一个长方形去逼近 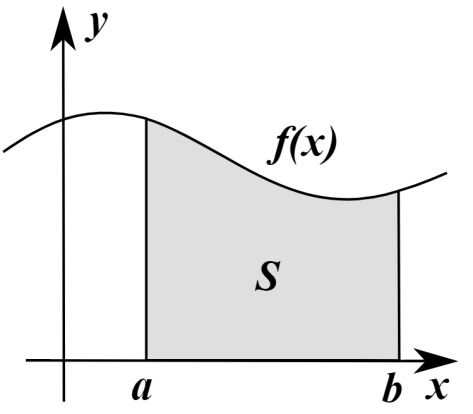
 ,
, ,
, 表示这些区间长度的最大值,在这里
表示这些区间长度的最大值,在这里  。在每一个子区间上
。在每一个子区间上![[x_{i},x_{i+1}]](https://s0.wp.com/latex.php?latex=%5Bx_%7Bi%7D%2Cx_%7Bi%2B1%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 上取出一个点
上取出一个点 ![t_{i}\in[x_{i},x_{i+1}]](https://s0.wp.com/latex.php?latex=t_%7Bi%7D%5Cin%5Bx_%7Bi%7D%2Cx_%7Bi%2B1%7D%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 。而函数
。而函数 
![[a,b]](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 上的取值是
上的取值是  的意思是:
的意思是: ,存在
,存在  使得对于任意取样分割,当
使得对于任意取样分割,当  时,就有
时,就有
 .
.


 ,这里的
,这里的  是系数,
是系数, 是可测集合,
是可测集合, 表示指示函数。当
表示指示函数。当 
 是一个非负可测函数时,可以定义函数
是一个非负可测函数时,可以定义函数  上的 Lebesgue 积分是:
上的 Lebesgue 积分是: ,
, 表示零函数,这里的大小关系表示对定义域内的每个点都要成立。
表示零函数,这里的大小关系表示对定义域内的每个点都要成立。 ,而这里的
,而这里的  和
和  都是非负可测函数。所以可以定义任意可测函数的 Lebesgue 积分如下:
都是非负可测函数。所以可以定义任意可测函数的 Lebesgue 积分如下: .
.![(R)\int_{a}^{b}f(x)dx = (L)\int_{[a,b]}f(x)dx](https://s0.wp.com/latex.php?latex=%28R%29%5Cint_%7Ba%7D%5E%7Bb%7Df%28x%29dx+%3D+%28L%29%5Cint_%7B%5Ba%2Cb%5D%7Df%28x%29dx&bg=ffffff&fg=2b2b2b&s=1&c=20201002) .
. 是有理数时,
是有理数时, ;
; .
. ,无法画出函数图像,它不是 Riemann 可积的,但是它 Lebesgue 可积。
,无法画出函数图像,它不是 Riemann 可积的,但是它 Lebesgue 可积。 这样的定义域而已。所以,之前所讨论的很多连续函数的想法都可以应用在时间序列上。
这样的定义域而已。所以,之前所讨论的很多连续函数的想法都可以应用在时间序列上。 用
用  来表示,其中
来表示,其中  。那么后者就是原始序列的一种表示(representation)。
。那么后者就是原始序列的一种表示(representation)。 ,定义 PAA 的序列是:
,定义 PAA 的序列是: ,
, .
. 。用图像来表示那就是:
。用图像来表示那就是: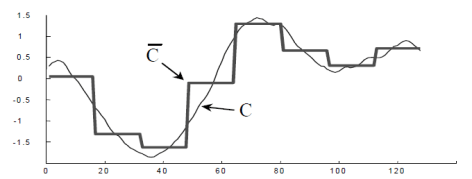
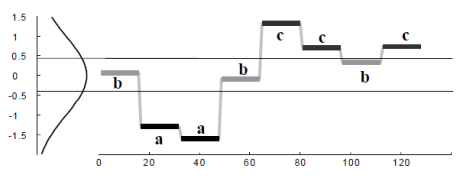
 的定义上稍作修改即可。
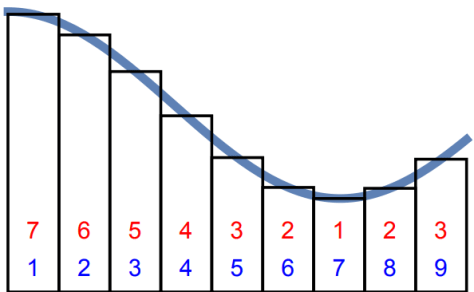
的定义上稍作修改即可。 个符号来表示时间序列,那么我们其实可以考虑正态分布
个符号来表示时间序列,那么我们其实可以考虑正态分布  ,用
,用 来表示 Gauss 曲线下方的一些点,而这些点把 Gauss 曲线下方的面积等分成了
来表示 Gauss 曲线下方的一些点,而这些点把 Gauss 曲线下方的面积等分成了  表示
表示  。
。 ,那么
,那么  ;如果
;如果  ,那么
,那么  ,在这里
,在这里  ;如果
;如果  ,那么
,那么  。
。
 .
.
 表示时间序列 X 的取值落在第 k 个桶的比例(概率),maxbin 表示桶的个数,len(X) 表示时间序列 X 的长度。
表示时间序列 X 的取值落在第 k 个桶的比例(概率),maxbin 表示桶的个数,len(X) 表示时间序列 X 的长度。 上的距离函数定义为
上的距离函数定义为  ,其中
,其中  表示实数集合,并且函数
表示实数集合,并且函数  满足以下几个条件:
满足以下几个条件: ,并且
,并且  当且仅当
当且仅当  ;
; ,也就是满足对称性;
,也就是满足对称性; ,也就是三角不等式。
,也就是三角不等式。 (其中
(其中  或者
或者  )上的向量空间
)上的向量空间  与一个内积(映射)所构成,
与一个内积(映射)所构成, ,它满足以下设定:
,它满足以下设定: ,有
,有 





 的映射:
的映射: 是同构映射。
是同构映射。 和
和  ,于是可以使用欧几里德空间里面的
,于是可以使用欧几里德空间里面的 




 ,
,  。
。 ,则
,则  表是它们是完全一致的,如果两条时间序列
表是它们是完全一致的,如果两条时间序列  ,则
,则  表示它们之间是负相关的。
表示它们之间是负相关的。 .
.

 .
.
 的性质:
的性质:
 表示两条时间序列持有类似的趋势, 它们会同时上涨或者下跌,并且涨幅或者跌幅也是类似的。
表示两条时间序列持有类似的趋势, 它们会同时上涨或者下跌,并且涨幅或者跌幅也是类似的。 表示两条时间序列的上涨和下跌趋势恰好相反。
表示两条时间序列的上涨和下跌趋势恰好相反。 表示两条时间序列在单调性方面没有相关性。
表示两条时间序列在单调性方面没有相关性。![d_{CORT}(X_{T},Y_{T}) = \phi_{k}[CORT(X_{T},Y_{T})]\cdot d(X_{T},Y_{T}),](https://s0.wp.com/latex.php?latex=d_%7BCORT%7D%28X_%7BT%7D%2CY_%7BT%7D%29+%3D+%5Cphi_%7Bk%7D%5BCORT%28X_%7BT%7D%2CY_%7BT%7D%29%5D%5Ccdot+d%28X_%7BT%7D%2CY_%7BT%7D%29%2C&bg=ffffff&fg=2b2b2b&s=0&c=20201002)
 可以用
可以用  来计算,而
来计算,而
 ,可以定义自相关系数为:
,可以定义自相关系数为: ,
, 分别表示该时间序列的均值和方差。该公式相当于是比较整个时间序列
分别表示该时间序列的均值和方差。该公式相当于是比较整个时间序列  的两个子序列的相似度(Pearson 系数),这两个子序列分别是
的两个子序列的相似度(Pearson 系数),这两个子序列分别是  和
和  。
。 ,可以对每一个时间序列得到一组自相关系数的向量,用公式描述如下:
,可以对每一个时间序列得到一组自相关系数的向量,用公式描述如下:

 的情况,可以假定
的情况,可以假定  和
和  。于是,可以定义时间序列之间的距离如下:
。于是,可以定义时间序列之间的距离如下: .
. 表示一个
表示一个  的矩阵。它有着很多种选择,例如:
的矩阵。它有着很多种选择,例如: 表示单位矩阵。用公式表示就是
表示单位矩阵。用公式表示就是 .
. 表示一个
表示一个  。此时相当于一个带权重的求和公式。
。此时相当于一个带权重的求和公式。 .
. 和
和  两个距离公式。
两个距离公式。 ,
, .
. ,
, ,
,![n=[(T-1)/2]](https://s0.wp.com/latex.php?latex=n%3D%5B%28T-1%29%2F2%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 。这里的
。这里的 ![[\cdot]](https://s0.wp.com/latex.php?latex=%5B%5Ccdot%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 表示 Gauss 取整函数。
表示 Gauss 取整函数。 .
. ,
, ,
, ,
, 和
和  表示
表示  的标准差(sample variance)。
的标准差(sample variance)。 .
. 模型有自己的 AR 表示,因此可以得到相应的一组参数
模型有自己的 AR 表示,因此可以得到相应的一组参数  ,所以,对于每一条时间序列,都可以用一组最优的参数去逼近。如果
,所以,对于每一条时间序列,都可以用一组最优的参数去逼近。如果

 和
和  对于时间序列
对于时间序列  和
和  的参数估计,则 Piccolo 距离如下:
的参数估计,则 Piccolo 距离如下: ,
, ,
, 当
当  ,并且
,并且  当
当  。
。 当
当  ,并且
,并且  当
当  。
。
 和
和  表示
表示  模型对于
模型对于  ,
, 和
和  表示时间序列的方差,
表示时间序列的方差, 和
和  表示时间序列的 sample covariance 矩阵。
表示时间序列的 sample covariance 矩阵。 的结构,i.e.
的结构,i.e.  ,这里的
,这里的  表示 AR 模型的参数,
表示 AR 模型的参数, 表示白噪声(均值为 0,方差为 1 的 Gauss 正态分布)。于是可以从这些参数定义 LPC 系数如下:
表示白噪声(均值为 0,方差为 1 的 Gauss 正态分布)。于是可以从这些参数定义 LPC 系数如下: ,
, 当
当  ,
, 当
当  。
。 .
. 范数的距离,基于相关性的距离,基于周期图表的计算方法,基于模型的计算方法。
范数的距离,基于相关性的距离,基于周期图表的计算方法,基于模型的计算方法。 的时间序列,那么这些统计特征用数学公式来表示就是:
的时间序列,那么这些统计特征用数学公式来表示就是:

![\text{skewness}(X) = E[(\frac{X-\mu}{\sigma})^{3}]=\frac{1}{T}\sum_{i=1}^{T}\frac{(x_{i}-\mu)^{3}}{\sigma^{3}},](https://s0.wp.com/latex.php?latex=%5Ctext%7Bskewness%7D%28X%29+%3D+E%5B%28%5Cfrac%7BX-%5Cmu%7D%7B%5Csigma%7D%29%5E%7B3%7D%5D%3D%5Cfrac%7B1%7D%7BT%7D%5Csum_%7Bi%3D1%7D%5E%7BT%7D%5Cfrac%7B%28x_%7Bi%7D-%5Cmu%29%5E%7B3%7D%7D%7B%5Csigma%5E%7B3%7D%7D%2C&bg=ffffff&fg=2b2b2b&s=1&c=20201002)
![\text{kurtosis}(X) = E[(\frac{X-\mu}{\sigma})^{4}]=\frac{1}{T}\sum_{i=1}^{T}\frac{(x_{i}-\mu)^{4}}{\sigma^{4}} .](https://s0.wp.com/latex.php?latex=%5Ctext%7Bkurtosis%7D%28X%29+%3D+E%5B%28%5Cfrac%7BX-%5Cmu%7D%7B%5Csigma%7D%29%5E%7B4%7D%5D%3D%5Cfrac%7B1%7D%7BT%7D%5Csum_%7Bi%3D1%7D%5E%7BT%7D%5Cfrac%7B%28x_%7Bi%7D-%5Cmu%29%5E%7B4%7D%7D%7B%5Csigma%5E%7B4%7D%7D+.&bg=ffffff&fg=2b2b2b&s=1&c=20201002)
 和
和  分别表示时间序列
分别表示时间序列 
![[\min(X_{T}), \max(X_{T})]](https://s0.wp.com/latex.php?latex=%5B%5Cmin%28X_%7BT%7D%29%2C+%5Cmax%28X_%7BT%7D%29%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 这个区间等分为十个小区间,那么时间序列的取值就会分散在这十个桶中。根据这个等距分桶的情况,就可以计算出这个概率分布的熵(entropy)。i.e. Binned Entropy 就可以定义为:
这个区间等分为十个小区间,那么时间序列的取值就会分散在这十个桶中。根据这个等距分桶的情况,就可以计算出这个概率分布的熵(entropy)。i.e. Binned Entropy 就可以定义为: 个桶的比例(概率),
个桶的比例(概率), 表示桶的个数,
表示桶的个数, 表示时间序列
表示时间序列  的长度是
的长度是  ,同时 Approximate Entropy 函数拥有两个参数,
,同时 Approximate Entropy 函数拥有两个参数, 与
与  ,下面来详细介绍 Approximate Entropy 的算法细节。
,下面来详细介绍 Approximate Entropy 的算法细节。


 ,可以计算出哪些向量与
,可以计算出哪些向量与  较为相似。i.e.
较为相似。i.e.
 范数。
范数。

 会基于具体的时间序列具体调整;
会基于具体的时间序列具体调整; 和
和  ,分别是
,分别是

 表示集合的元素个数。根据度量
表示集合的元素个数。根据度量  )的定义可以知道
)的定义可以知道 ,因此 Sample Entropy 总是非负数,i.e.
,因此 Sample Entropy 总是非负数,i.e.
 .
.
 ,这里n表示有n个事件发生。时间序列(S)表示为
,这里n表示有n个事件发生。时间序列(S)表示为 ,这里的m表示时间序列的长度。时间序列的时间戳可以选择一个等差序列,等差用
,这里的m表示时间序列的长度。时间序列的时间戳可以选择一个等差序列,等差用 来表示,并且
来表示,并且 ,and
,and  +
+ 来表示某个事件,
来表示某个事件, 表示序列S在事件
表示序列S在事件 表示序列S在事件
表示序列S在事件 和
和 应该是不一样的。
应该是不一样的。 ,当且仅当
,当且仅当 ,当且仅当
,当且仅当 (or
(or  )。如果
)。如果 (or
(or  )。
)。 来做例子,
来做例子, 是随机选择的,
是随机选择的, ,可以标记为
,可以标记为 ,其中
,其中 +
+ 。
。 when
when  when
when  +
+ 。可以使用记号
。可以使用记号 ,其中
,其中 ,
, 是随机选择的。
是随机选择的。 而言,
而言, 表示
表示 中距离x最近的第r个元素,对于两个不相交的集合
中距离x最近的第r个元素,对于两个不相交的集合 和
和  ,可以定义方程:
,可以定义方程: when
when  ,
, when otherwise.
when otherwise. 表示x与x的第r个最近的邻居是否在同一个子集内。
表示x与x的第r个最近的邻居是否在同一个子集内。 ,
, 表示集合A的第i个元素。从直觉上讲,如果
表示集合A的第i个元素。从直觉上讲,如果 小,则说明两类samples
小,则说明两类samples  混合得非常好,表示无异常情况;如果
混合得非常好,表示无异常情况;如果 遵循标准Gauss分布,其参数是
遵循标准Gauss分布,其参数是 +
+ ,
,  +
+ ,
, +
+ ,
,  +
+ 有显著的不同,当
有显著的不同,当 ,在这里,参数可以按照以下标准设置:
,在这里,参数可以按照以下标准设置: for
for  ,
, for
for  。
。 并且它与
并且它与
 。
。 。
。 的概念。
的概念。 而言,其中n是E中的事件个数。
而言,其中n是E中的事件个数。 .
. ,可以得到
,可以得到  或者
或者  ,可以得到
,可以得到  或者
或者 
 是 True 表示
是 True 表示  是 True 表示
是 True 表示  ,其中p是样本的总个数。
,其中p是样本的总个数。


 ,而不是
,而不是 ,因为
,因为  是递增排列的,并且 best-so-far > 0.
是递增排列的,并且 best-so-far > 0.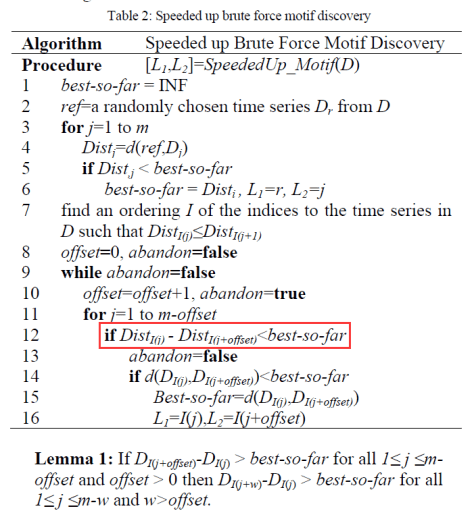
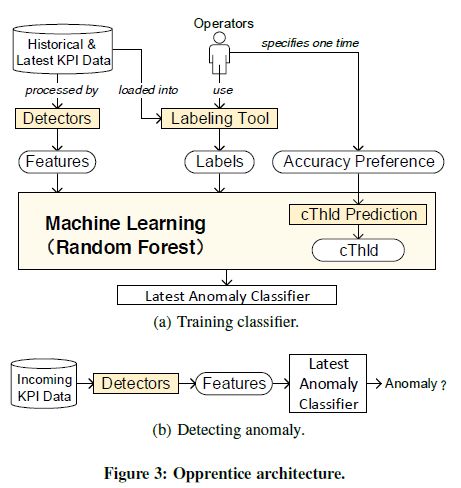
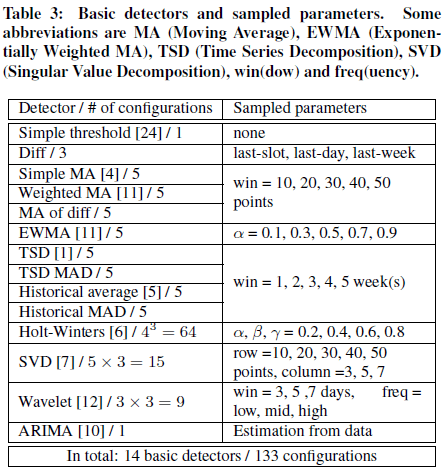
 to obtain 5 typical features from EWMA; Holt-Winters has three [0,1] valued parameters
to obtain 5 typical features from EWMA; Holt-Winters has three [0,1] valued parameters  . To choose
. To choose  , we have
, we have  features; In ARIMA, we can estimate their “best” parameters from the data, and generate only one set of parameters, or one configuration for each detector.
features; In ARIMA, we can estimate their “best” parameters from the data, and generate only one set of parameters, or one configuration for each detector.
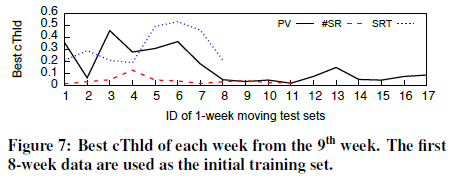
 , then
, then  5-fold prediction
5-fold prediction , then
, then  +
+ , where
, where  is the best cThld of the (i-1)-th week.
is the best cThld of the (i-1)-th week.  is the predicted cThld of the i-th week, and also the one used for detecting the i-th week data.
is the predicted cThld of the i-th week, and also the one used for detecting the i-th week data. ![\alpha\in [0,1]](https://s0.wp.com/latex.php?latex=%5Calpha%5Cin+%5B0%2C1%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) is the smoothing constant.
is the smoothing constant. . As
. As  in this paper.
in this paper.

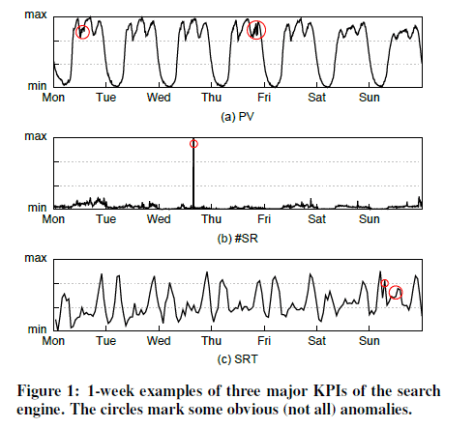
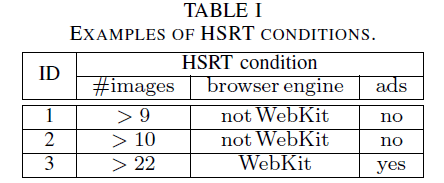
 is when a query is submitted;
is when a query is submitted;  is when the result HTML file has been downloaded;
is when the result HTML file has been downloaded;  is when a brower finishes parsing the HTML;
is when a brower finishes parsing the HTML;  is when the page is completely rendered. SRT is measured by
is when the page is completely rendered. SRT is measured by  , the user-received search response time.
, the user-received search response time. is the server response time of the HTML file, which is recorded by servers;
is the server response time of the HTML file, which is recorded by servers;  is the network transmission time of the HTML file;
is the network transmission time of the HTML file;  is the browser parsing time of the HTML;
is the browser parsing time of the HTML;  is the remaining time spent before the page is rendered, e.g. download time of images from image servers.
is the remaining time spent before the page is rendered, e.g. download time of images from image servers.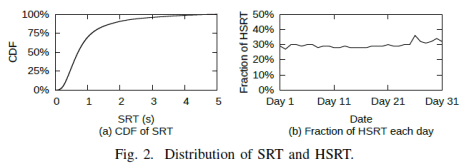
 ,
, affects SRT.
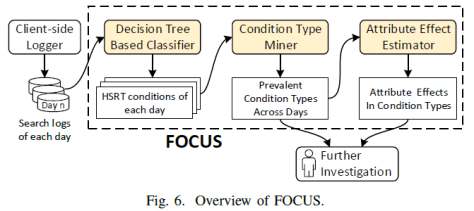
affects SRT. ? What SRT components (e.g.
? What SRT components (e.g.  and
and  to get a variant condition type
to get a variant condition type  . In the past days, we have the number of HSRT events in total, the number of HSRT events in condition
. In the past days, we have the number of HSRT events in total, the number of HSRT events in condition  . As a result, we believe the historical data based comparison can provide a reasonable estimate of the attribute effects. The comparison between
. As a result, we believe the historical data based comparison can provide a reasonable estimate of the attribute effects. The comparison between 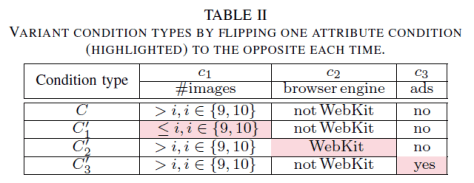
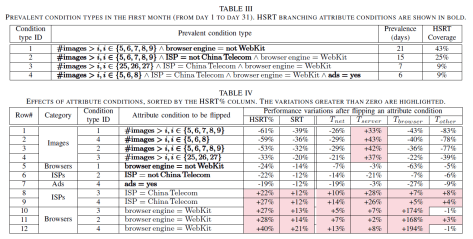
 (row 7)?
(row 7)? (row 5, 10, 11, 12)?
(row 5, 10, 11, 12)? 来表示,其中
来表示,其中  。同时假设在语料库中出现的所有词语的集合是
。同时假设在语料库中出现的所有词语的集合是  。
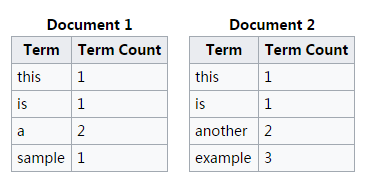
。 在该文件中出现的频率。词频通常定义为:
在该文件中出现的频率。词频通常定义为:
 指的是词语
指的是词语  则是文件
则是文件  ,其中
,其中  是指示函数,
是指示函数,

 +
+ 
 +
+  ,其中
,其中  ,或者 K 直接取值为 0.5 即可。
,或者 K 直接取值为 0.5 即可。
 表示的是在语料库中包含词语
表示的是在语料库中包含词语  的文件个数。
的文件个数。 +
+  ,
,
 +
+ 


 ,
, ,
, ,
, 。原因是 “this” 这个词语在两个文件中都出现了,是一个常见的词语。
。原因是 “this” 这个词语在两个文件中都出现了,是一个常见的词语。 ,
, ,
,  ,
, ,
, 。原因是 “example” 这个词语在第一份文件中没有出现,第二份文件中出现了。
。原因是 “example” 这个词语在第一份文件中没有出现,第二份文件中出现了。

 。
。
 。
。
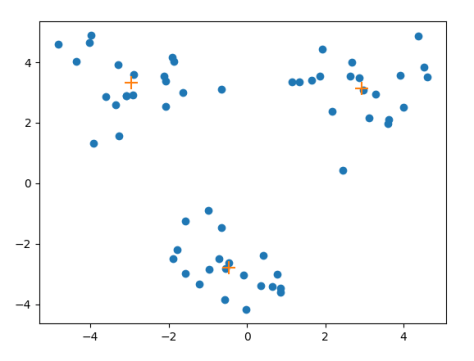
![A[0],A[1],\cdot\cdot\cdot,A[n-1]](https://s0.wp.com/latex.php?latex=A%5B0%5D%2CA%5B1%5D%2C%5Ccdot%5Ccdot%5Ccdot%2CA%5Bn-1%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,那么质心就是
,那么质心就是 ![\sum_{i=0}^{n-1}A[i]/n](https://s0.wp.com/latex.php?latex=%5Csum_%7Bi%3D0%7D%5E%7Bn-1%7DA%5Bi%5D%2Fn&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ;
;![num[j]](https://s0.wp.com/latex.php?latex=num%5Bj%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 表示。
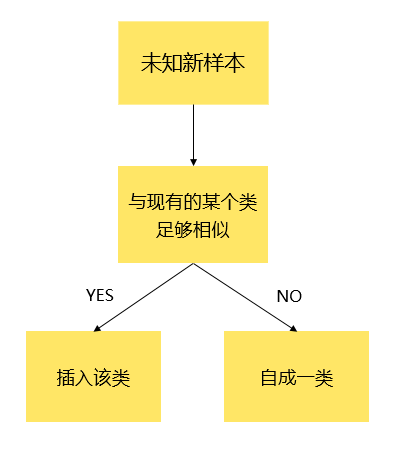
表示。![dataMat[0]](https://s0.wp.com/latex.php?latex=dataMat%5B0%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 而言,自成一类。i.e. 质心就是它本身
而言,自成一类。i.e. 质心就是它本身 ![C[0]=dataMat[0]](https://s0.wp.com/latex.php?latex=C%5B0%5D%3DdataMat%5B0%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,该聚簇的元素个数就是
,该聚簇的元素个数就是 ![num[0]=1](https://s0.wp.com/latex.php?latex=num%5B0%5D%3D1&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,当前所有簇的个数是
,当前所有簇的个数是  。
。 ,进行如下的循环操作:
,进行如下的循环操作: 个簇,第 j 个簇的质心是
个簇,第 j 个簇的质心是 ![C[j]](https://s0.wp.com/latex.php?latex=C%5Bj%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,第 j 个簇的元素个数是
,第 j 个簇的元素个数是  。
。![d= \min_{0\leq j\leq K^{'}-1}Distance(dataMat[i],C[j])](https://s0.wp.com/latex.php?latex=d%3D+%5Cmin_%7B0%5Cleq+j%5Cleq+K%5E%7B%27%7D-1%7DDistance%28dataMat%5Bi%5D%2CC%5Bj%5D%29&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,其中的 Distance 可以是欧几里德空间的
,其中的 Distance 可以是欧几里德空间的  范数,对应的下标是
范数,对应的下标是  。i.e.
。i.e. ![j'=argmin_{0\leq j\leq K'-1}Distance(dataMat[i],C[j])](https://s0.wp.com/latex.php?latex=j%27%3Dargmin_%7B0%5Cleq+j%5Cleq+K%27-1%7DDistance%28dataMat%5Bi%5D%2CC%5Bj%5D%29&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 。
。 或者
或者  ,则把
,则把 ![dataMat[i]](https://s0.wp.com/latex.php?latex=dataMat%5Bi%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 加入到第
加入到第 ![C[j'] \leftarrow (C[j']*num[j]](https://s0.wp.com/latex.php?latex=C%5Bj%27%5D+%5Cleftarrow+%28C%5Bj%27%5D%2Anum%5Bj%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) +
+ ![dataMat[i])/(num[j]](https://s0.wp.com/latex.php?latex=dataMat%5Bi%5D%29%2F%28num%5Bj%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) +
+  ,
,![num[j'] \leftarrow num[j']](https://s0.wp.com/latex.php?latex=num%5Bj%27%5D+%5Cleftarrow+num%5Bj%27%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) +
+  +
+ ![num[K'-1]=1](https://s0.wp.com/latex.php?latex=num%5BK%27-1%5D%3D1&bg=ffffff&fg=2b2b2b&s=0&c=20201002) ,
,![C[K'-1]=dataMat[i]](https://s0.wp.com/latex.php?latex=C%5BK%27-1%5D%3DdataMat%5Bi%5D&bg=ffffff&fg=2b2b2b&s=0&c=20201002) 。
。

 ,动作是
,动作是  。该 agent 的策略定义为在状态
。该 agent 的策略定义为在状态  。如果折扣因子是
。如果折扣因子是  ,那么基于策略
,那么基于策略  的动作值函数就定义为:
的动作值函数就定义为:![Q^{\pi}(s,a)=E[\sum_{i=0}^{\infty}\gamma^{i}r_{t+i}|s_{t}=s, a_{t}=a]](https://s0.wp.com/latex.php?latex=Q%5E%7B%5Cpi%7D%28s%2Ca%29%3DE%5B%5Csum_%7Bi%3D0%7D%5E%7B%5Cinfty%7D%5Cgamma%5E%7Bi%7Dr_%7Bt%2Bi%7D%7Cs_%7Bt%7D%3Ds%2C+a_%7Bt%7D%3Da%5D&bg=ffffff&fg=2b2b2b&s=1&c=20201002) .
.
 是在状态
是在状态  是
是  是某个常数。
是某个常数。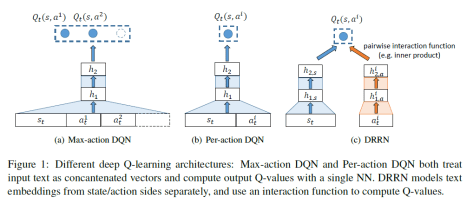
 ,使用相应的神经网络同时把
,使用相应的神经网络同时把  和
和  ,然后计算这两个向量的内积
,然后计算这两个向量的内积  ,最后选择
,最后选择  作为当前状态的动作。其中,
作为当前状态的动作。其中, 分别指的是状态网络和动作网络的第
分别指的是状态网络和动作网络的第  个隐藏层神经网络的输出。
个隐藏层神经网络的输出。 ,
,  和
和  ,
,  是在第
是在第  层和第
层和第 



 。Q 值函数定义为
。Q 值函数定义为  ,其中 g 可以定义为两个向量的内积。
,其中 g 可以定义为两个向量的内积。


9 Comments